
navigation stack problem in real robot
Hello all
My team's project is a mobile robot with ROS ( using navigation stack)
we implement the hardware, test it and it works well.
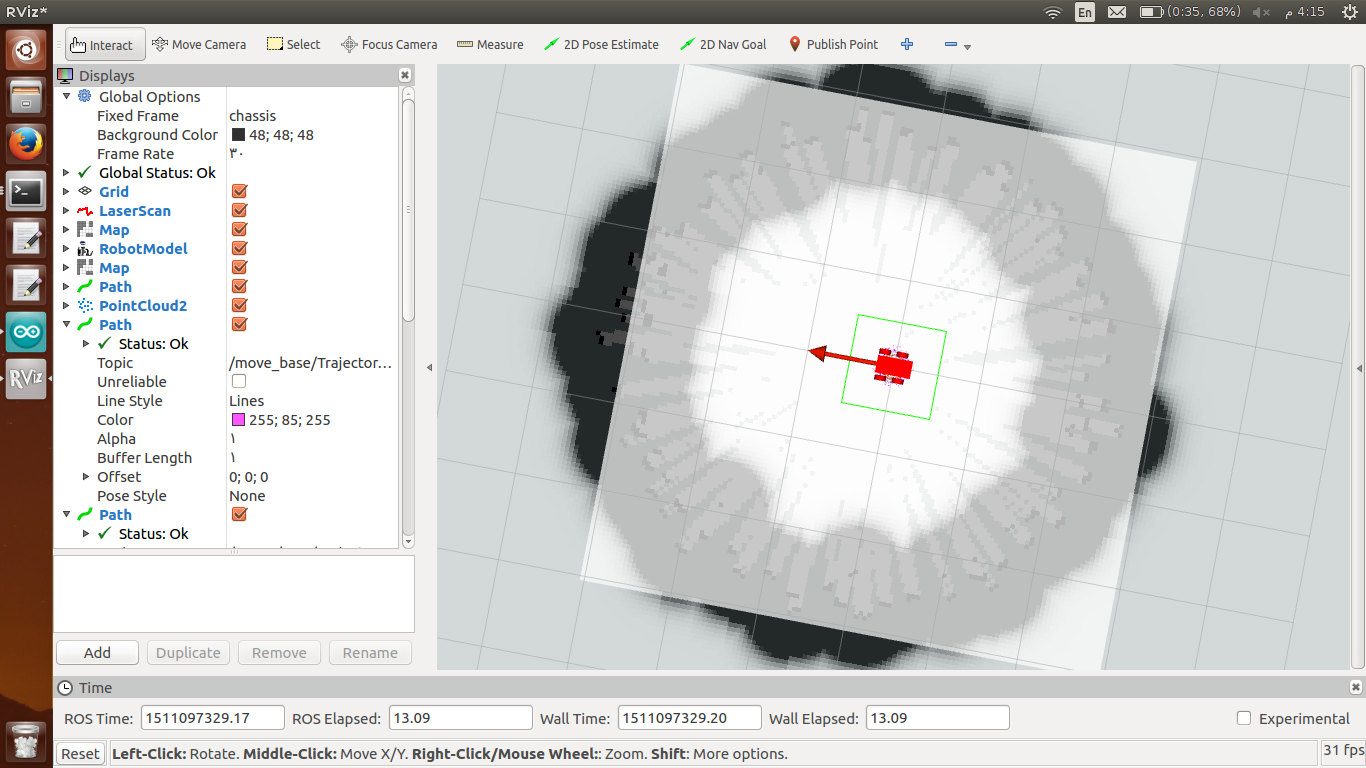
we test it with move_base we select a goal. getting a path but the movement of the motors was not stable. it doesn't move in the map and in the reality it tries to turn the motors left and right and the straight move is not continuous but like pulses. so we didn't get a movement on the path specified. the RQT_graph, frames and robot photos are attached
thanks for help




It doesn't look like your arduino isn't publishing odometry messages. How are you providing position feedback to tell move_base where the robot is?
What does happen when you manually tell your robot to move forward? e.g.
@Humpelstilzchen when i test robot with tele-operate by keyboard (this node : $rosrun teleop_twist_keyboard teleop_twist_keyboard.py) it works well
Check the odometry, see the navigation troubleshooting guide