
Bottom camera problem
Hi, I use gazebo 2.2 with ROS package tum_simulator. This is a package with simulator of quadrotor AR Parrot Drone.
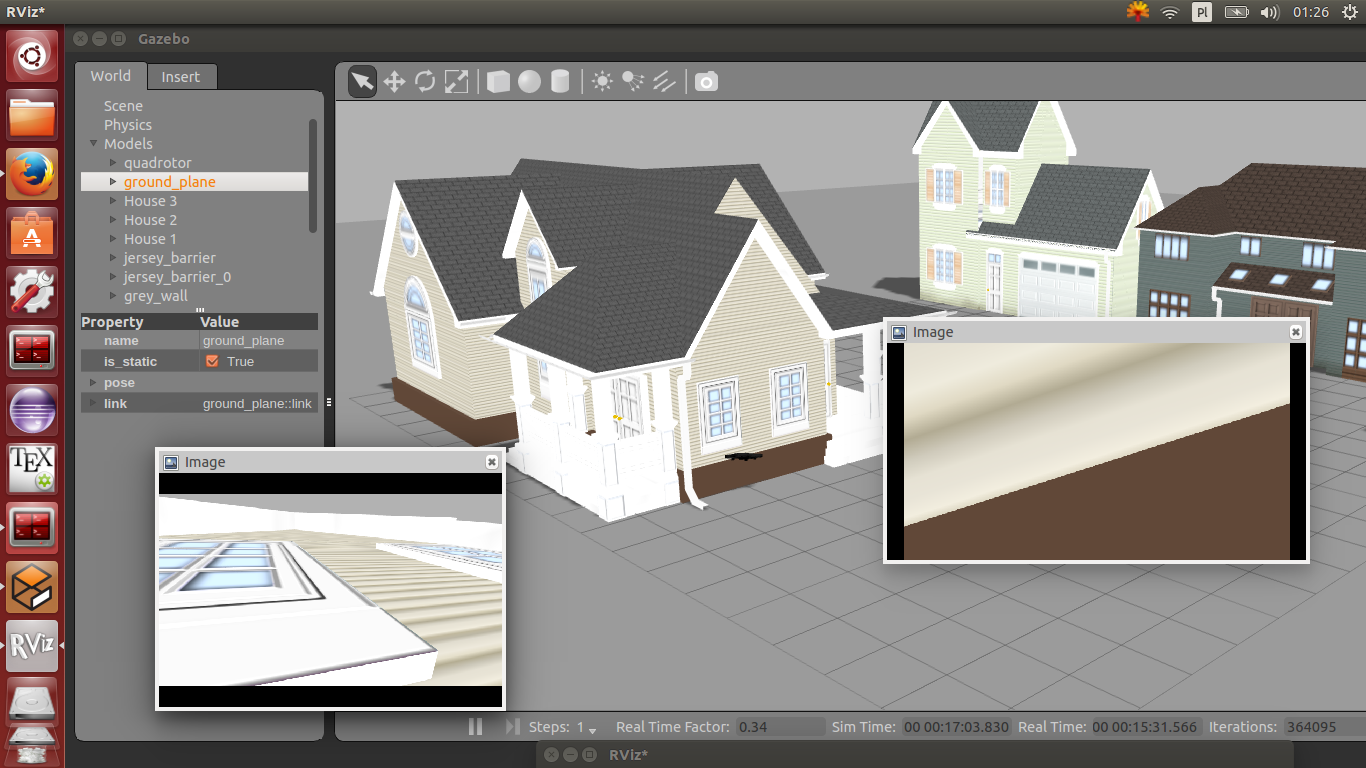
I had thought that bottom camera is not working and only front camera is OK, but I noticed that image from bottom camera don't display ground but sky. (strange)
Please check this screen: http://snag.gy/L5Riw.jpg
This is a world from Gazebo and two windows from rviz. Left image is a view from bottom camera :( and right image is a view from front camera. Black shape near window of the house is quadrotors' model.
Have you ever heard abut this problem? Any ideas?
I notice that when I run this node I got some errors, I hope that this is a reason of problems with camera.
Error [SDF.cc:788] Missing element description for [offset]
Error [SDF.cc:788] Missing element description for [drift]
Error [SDF.cc:788] Missing element description for [driftFrequency]
[ INFO] [1415319050.065958118, 659.736000000]: Camera Plugin (ns = /) <tf_prefix_>, set to ""
[ INFO] [1415319050.244706409, 659.736000000]: Camera Plugin (ns = /) <tf_prefix_>, set to ""
Error [SDF.cc:788] Missing element description for [accelOffset]
Error [SDF.cc:788] Missing element description for [accelDriftFrequency]
Error [SDF.cc:788] Missing element description for [rateOffset]
Error [SDF.cc:788] Missing element description for [rateDriftFrequency]
Error [SDF.cc:788] Missing element description for [headingOffset]
Error [SDF.cc:788] Missing element description for [headingDriftFrequency]
Error [SDF.cc:788] Missing element description for [driftFrequency]
Error [SDF.cc:788] Missing element description for [driftFrequency]
Error [SDF.cc:788] Missing element description for [offset]
Error [SDF.cc:788] Missing element description for [driftFrequency]
Error [SDF.cc:788] Missing element description for [velocityOffset]
Error [SDF.cc:788] Missing element description for [velocityDriftFrequency]
[ INFO] [1415319050.590175130, 659.736000000]: Using imu information on topic ardrone/imu as source of orientation and angular velocity.
Please help.
add a comment


{kind=link}