
understanding dual ekf outputs in robot_localization
Hi, I have a robot with wheel encoders, RTK GPS and an IMU (with magnetometer). I run two EKF instances, the first one fuse encoders (velocity, not position), Yaw and Z axis angular velocity from the IMU. The second one adds the odometry_gpd from navsat_transform node. I get /odometry/filtered and /odometry/filtered_map topics The first one is from odom to base_link (header.frame_id=odom and child_frame_id = base_link), the second one is from map to base_link. Is that ok?
I made a test that get me confused. I put my robot in a table with the wheels on the air. I drive the motors forward (at 1 meter/sec). I look at tf on rviz. I was expecting that odom frame will move forward and base_link will be quiet at 0,0. But I see odom frame is in the same position that map frame and base_link moves forwards. That does not make sense to me, because it is likely the GPS is not correcting anything. I mean, let say that GPS is reporting at 1 Hz, so between two GPS readings I expect that odom frame does not moves and base_link moves forward 1 meter, (because of the wheel encoders), but as soon as the GPS report a new data then base_link will have to move at 0,0 (because the GPS is telling that the robot doesn't move at all) and odom frame will needs to move 1 meter forward in order to maintain consistency. Am I wrong? Is not the expected behavior?
EDIT 1:
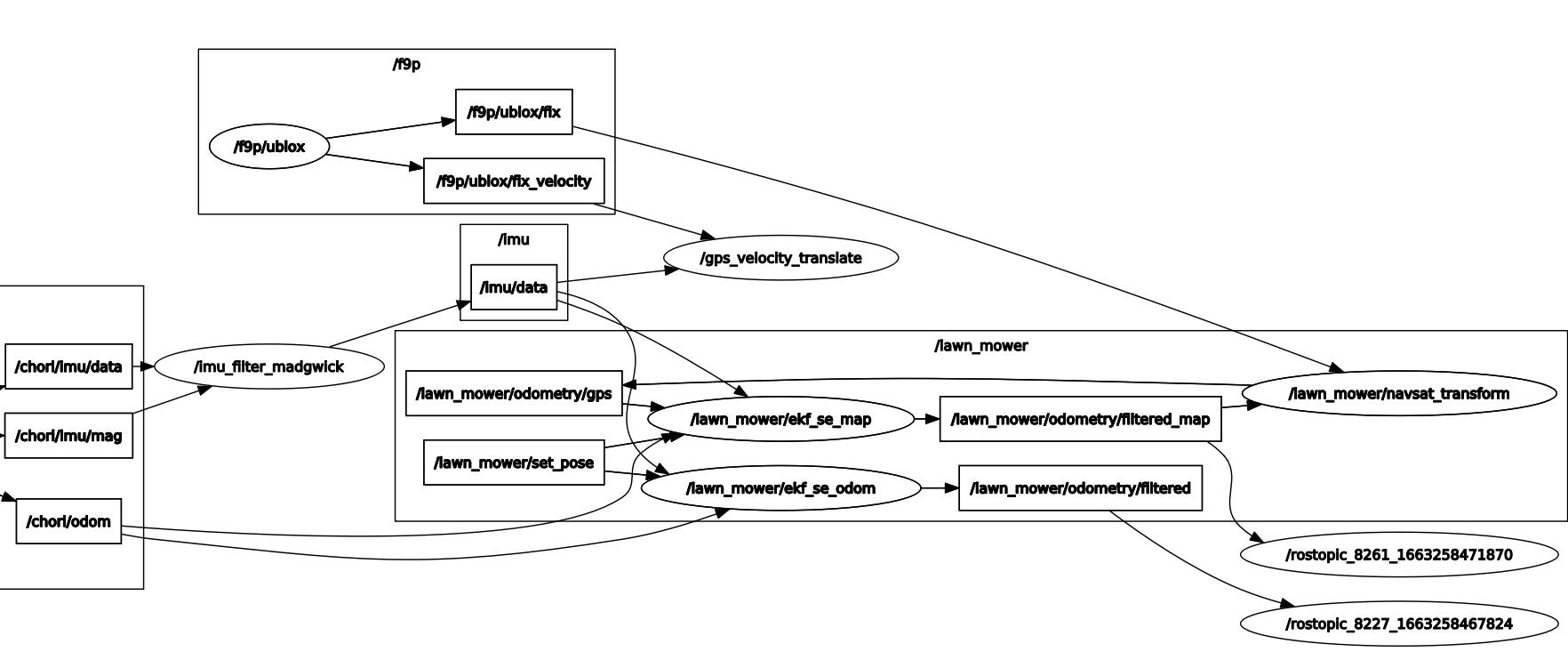
This is the rqt_graph
I made another test, I remove wheel encoders to the map EKF, now if I drive the motors with the wheels on the air the base_link frame is still with map frame and odom frame is moving. But if I let the robot run on the ground again the odom frame moves, but not base_link. It's likely something is disconected...
Thank and best regards.
