
Pointcloud2 in rviz
Hello everyone, I designed a robot in gazebo. The robot is equipped with a depth camera Kinect. That is, the file "libgazebo_ros_openni_kinect.so" is called.
I learned that when displaying point clouds in rviz, there will be point cloud pose errors.(Also happeded in my robot) Does this happen only in rviz, or is there an error in the relevant data of the whole point cloud?
If it is an error in the relevant data of the whole point cloud, how can I solve that problem?
Please help me
Here is the image of rviz: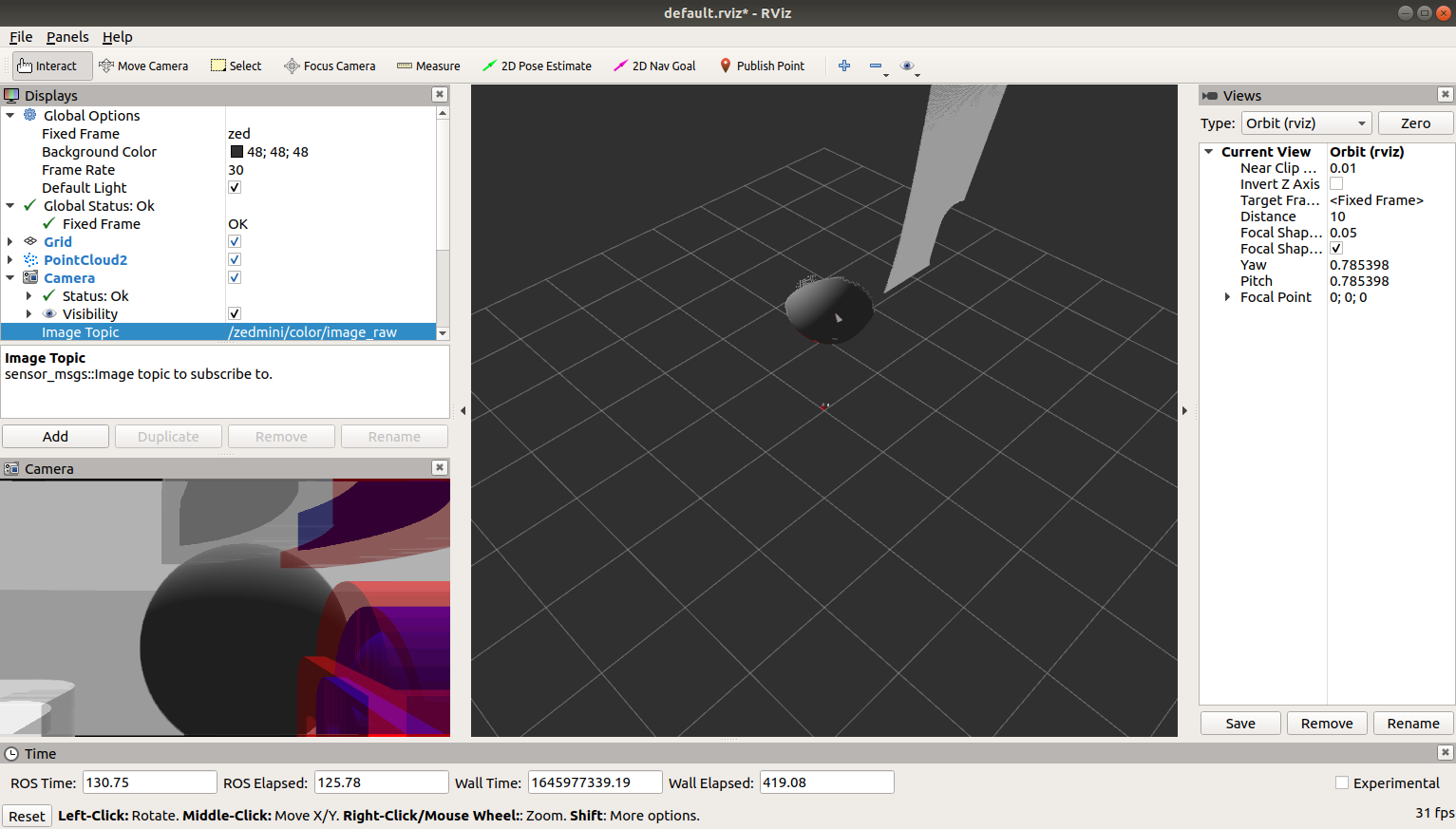
add a comment

