
DWA Planner path deflects and prevents smooth movement

Hi, here's the video. Problem occurs at 0:09 and 0:17. When i give goal to the robot, DWA planner produces local path but, after the robot gains good velocity, it produces a local path which greatly deflects from the global path and causes the robot to slow down and halt for a few moments before continuing.
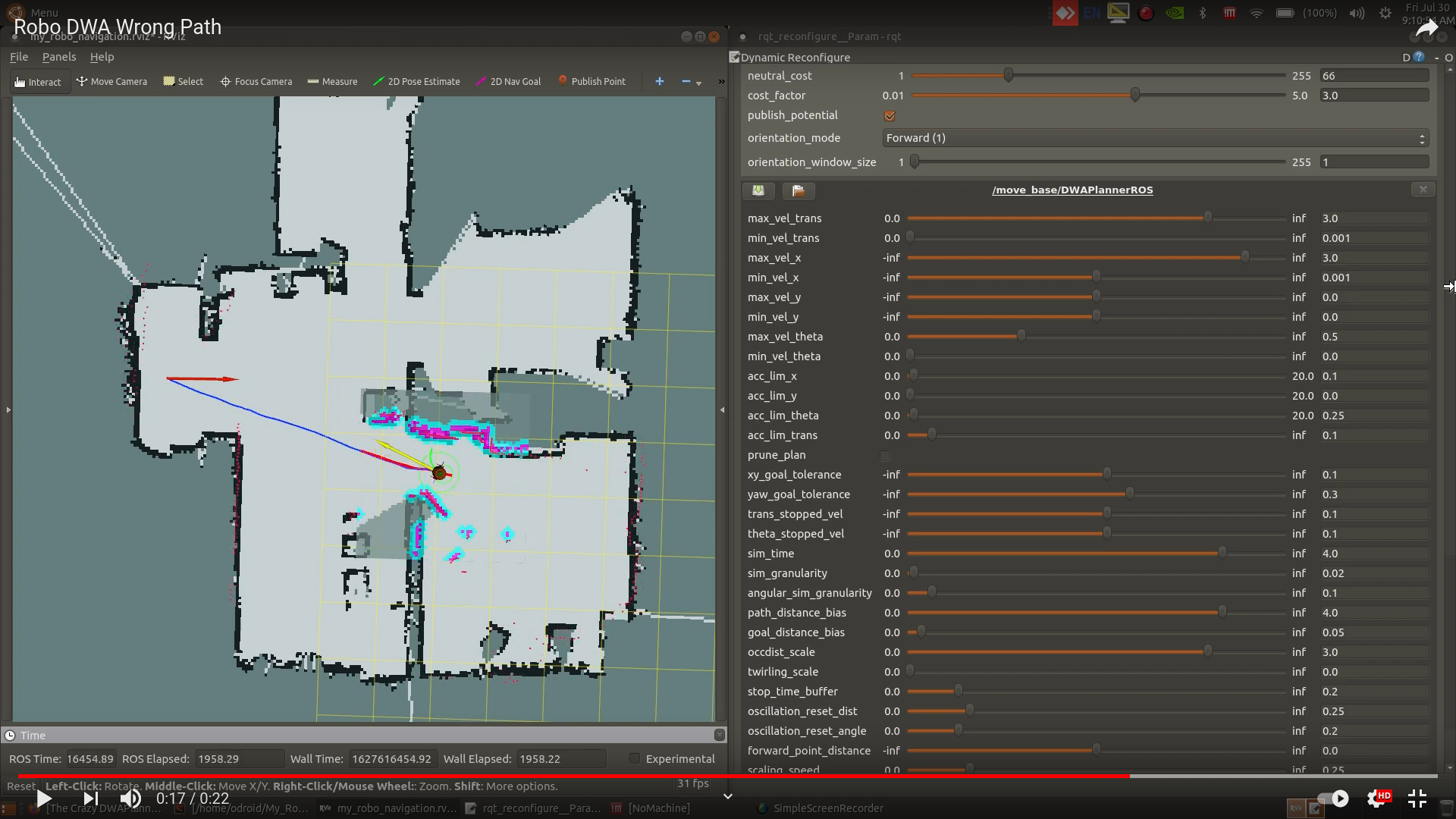
This reduces the performance of the robot. Any suggestions on how to make the movement smooth ?
local_costmap:
global_frame: map
robot_base_frame: base_footprint
robot_radius: 0.15
update_frequency: 1.0
publish_frequency: 1.0
transform_tolerance: 0.75
static_map: false
rolling_window: true
width: 3 #3
height: 3 #3
resolution: 0.05
inflation_radius: 0.1
cost_scaling_factor: 75
observation_sources: scan
scan: {sensor_frame: laser_link, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
DWAPlannerROS:
# Robot configuration parameters
acc_lim_x: 0.1
acc_lim_y: 0
acc_lim_theta: 0.25
acc_lim_trans: 0.15
max_vel_x: 3.0
min_vel_x: 0.001
max_vel_y: 0
min_vel_y: 0
max_vel_trans: 3.0
min_vel_trans: 0.001
max_vel_theta: 0.5
min_vel_theta: -0.5
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.3
xy_goal_tolerance: 0.1
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 4.0
sim_granularity: 0.02
vx_samples: 15
vy_samples: 1
vth_samples: 20
# penalize_negative_x: true
# Trajectory scoring parameters
path_distance_bias: 4.0
goal_distance_bias: 0.05
occdist_scale: 3.0
forward_point_distance: 0
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.25
#Debug
publish_traj_pc : true
publish_cost_grid_pc: true
#Move_Base_Params
shutdown_costmaps: false
planner_frequency: 1.0
controller_frequency: 1.0
planner_patience: 3.0
controller_patience: 3.0
conservative_reset_dist: 0.1
oscillation_timeout: 10.0
oscillation_distance: 0.2
max_planning_retries: -1
add a comment
