
should IMU frame follow the red-East, green-North and blue-Up convention?
Assuming an IMU without abs yaw. The starting pose of the robot is always at 0 yaw. Isn't ENU frame where: -Green axis points front(North) of vehicle -Red axis points right(East) of vehicle -Blue axis points up
I'm slightly confused since I see in the Jackal simulator that the imu_link frame is the same as base_link(red-x, green-y,blue-z):
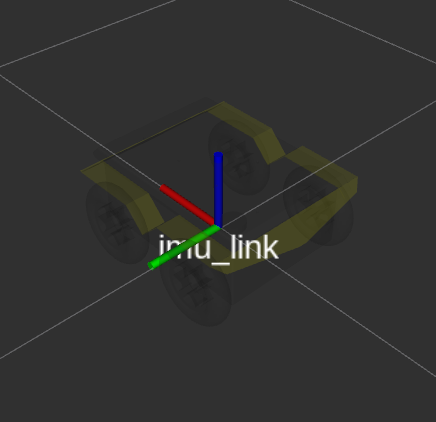
Here red points north, and green points west. Am I just misunderstanding something? Can someone clear this up for me? I know the jackal should be using a ENU imu as well.
In my simulation I use hector_gazebo_plugin imu. Do I need to apply a transform(rpy) relative to baselink to indicate that the IMU is ENU?
<joint name="IMU_FIXED" type="fixed">
<origin xyz="0.27876 -0.0014334 0.080087" rpy="0 3.1416 -1.5708" />
<parent link="base_link" />
<child link="imu_link" />
</joint>
add a comment

