
point cloud in wrong position relative to robot
Hello fellow roboticists,
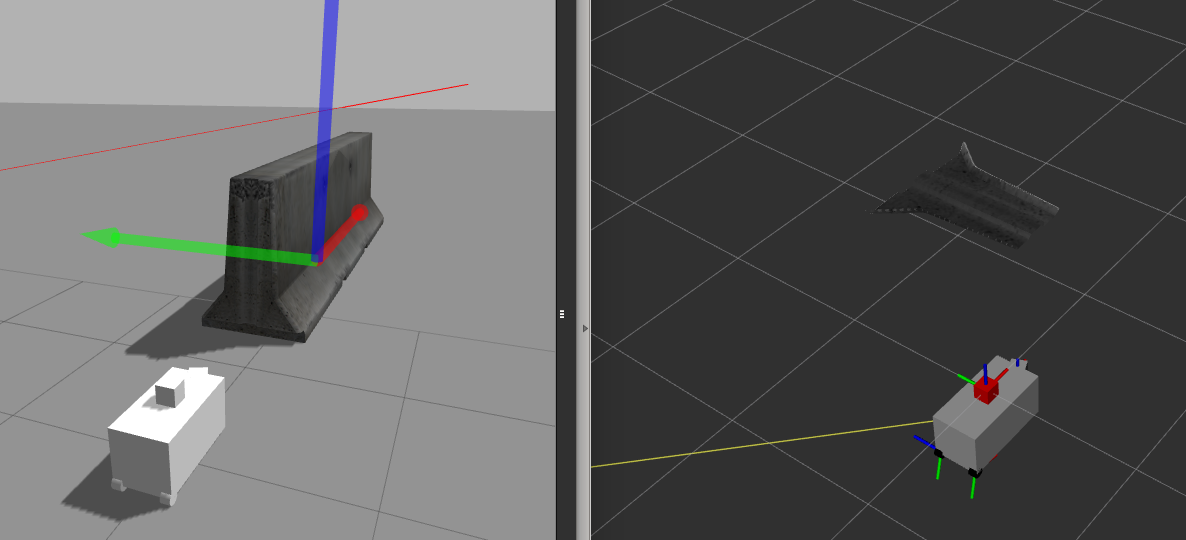
I have been trying to get a kinect sensor working on my urdf model in gazebo. i have successfully attached the sensor thanks to my previous question here. My only issue is that the data is being shown in the wrong place in Rviz. There, the point cloud that should be displayed as being in front of the robot is being displayed above it and rotated about the z axis. How shoud i go about fixing this?
Here is an image of what is happening (left is in Gazebo and the right is in Rviz):
and here is my urdf model that i am using:
<?xml version="1.0"?>
<robot name="tortoisebot">
<link name="base_link">
<visual>
<geometry>
<box size="0.6 0.3 0.3"/>
</geometry>
<material name="silver">
<color rgba="0.75 0.75 0.75 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.6 0.3 0.3"/>
</geometry>
</collision>
<inertial>
<mass value="1.0"/>
<inertia ixx="0.015" iyy="0.0375" izz="0.0375" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<link name="front_caster">
<visual>
<geometry>
<box size="0.1 0.1 0.3"/>
</geometry>
<material name="silver"/>
</visual>
<collision>
<geometry>
<box size="0.1 0.1 0.3"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.00083" iyy="0.00083" izz="0.000167" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<joint name="front_caster_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="front_caster"/>
<origin rpy="0 0 0" xyz="0.3 0 0"/>
</joint>
<link name="front_wheel">
<visual>
<geometry>
<cylinder length="0.05" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.035"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="5.1458e-5" iyy="5.1458e-5" izz="6.125e-5" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<joint name="front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="front_caster"/>
<child link="front_wheel"/>
<origin rpy="-1.5708 0 0" xyz="0.05 0 -.15"/>
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder length="0.05" radius="0.035"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.035"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="5.1458e-5" iyy="5.1458e-5" izz="6.125e-5" ixy="0" ixz="0" iyz="0"/>
</inertial>
</link>
<joint name="right_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_wheel"/>
<origin rpy="-1.5708 0 0" xyz="-0.2825 -0.125 -.15"/>
</joint>
<link name="left_wheel ...add a comment
