
Generating 3D map from Lidar data


I have a rosbag file of Velodyne 64. My question is that how I can generate a 3D map from that rosbag file?
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
I have a rosbag file of Velodyne 64. My question is that how I can generate a 3D map from that rosbag file?
I tried 3D Localization and mapping using hdl_graph_slam. Just using the Lidar scan and odometry and I was able to localize the sensor.
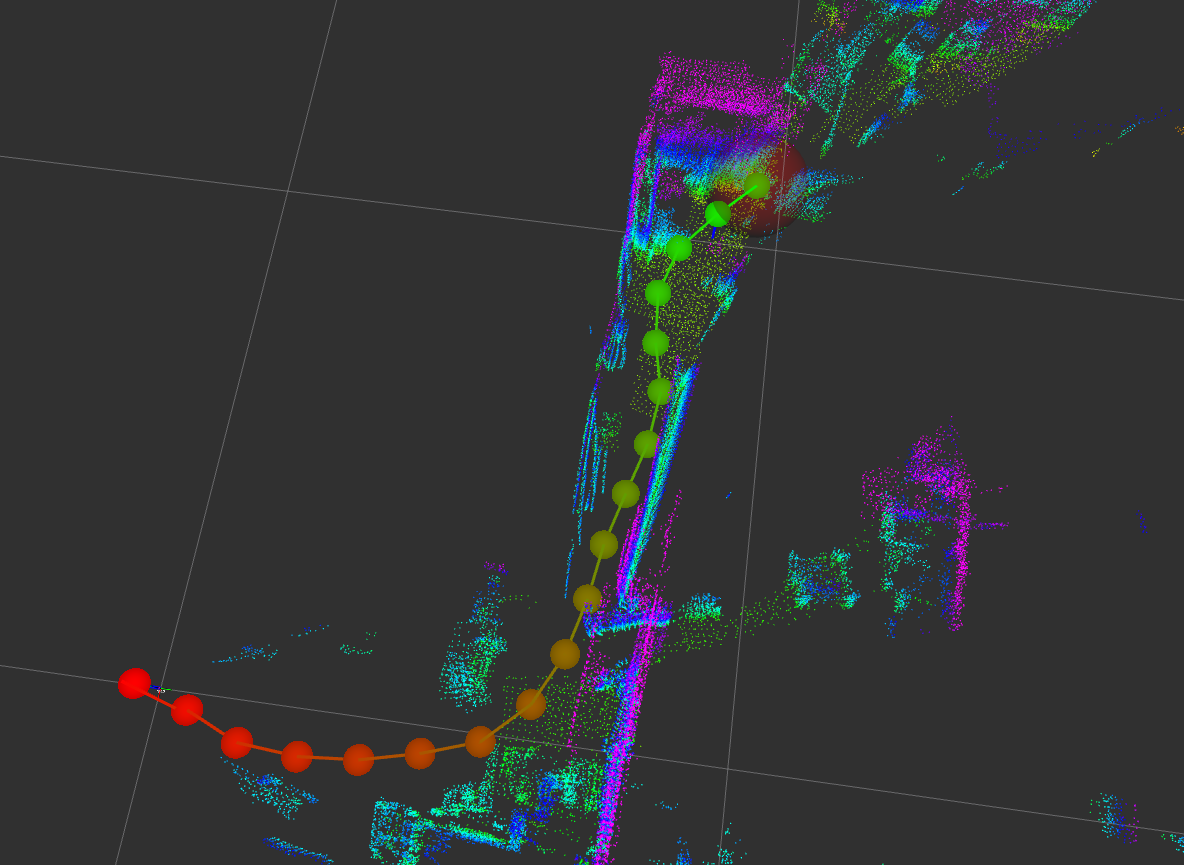
Here's the link of the same question already been asked here. You'll find a thoughful answer. Personnally, I'm working on setting up the Cartographer tool. I have a 3D Ouster 64.
Asked: 2019-06-14 02:40:54 -0500
Seen: 2,905 times
Last updated: Dec 30 '21
How to simulate Imaging Forward Looking Sonar in Rviz
unable to build the package using catkin build
What's the mechanism of the header timestamp of ROS message?
cv::Mat to nav_msgs::OccupancyGrid by vector assign
how to get turtlebot's yaw in gazebo?
How to connect Turtlebot in Gazebo to a Web Interface
How to localize and navigate in a 3D map?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.


What have you tried so far? Is your lidar sensor moving? Do you have any other sensors in the rosbag as well? What sort of map do you need to generate?
We're happy to help, but you're going to have to give us a lot more information.
My lidar sensor is moving and I have only sensor information of Lidar sensor in rosbag and i wanted to generate map for autonomous driving and I have odometry information also.