
Generating 3D map from Lidar data


I have a rosbag file of Velodyne 64. My question is that how I can generate a 3D map from that rosbag file?
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
I have a rosbag file of Velodyne 64. My question is that how I can generate a 3D map from that rosbag file?
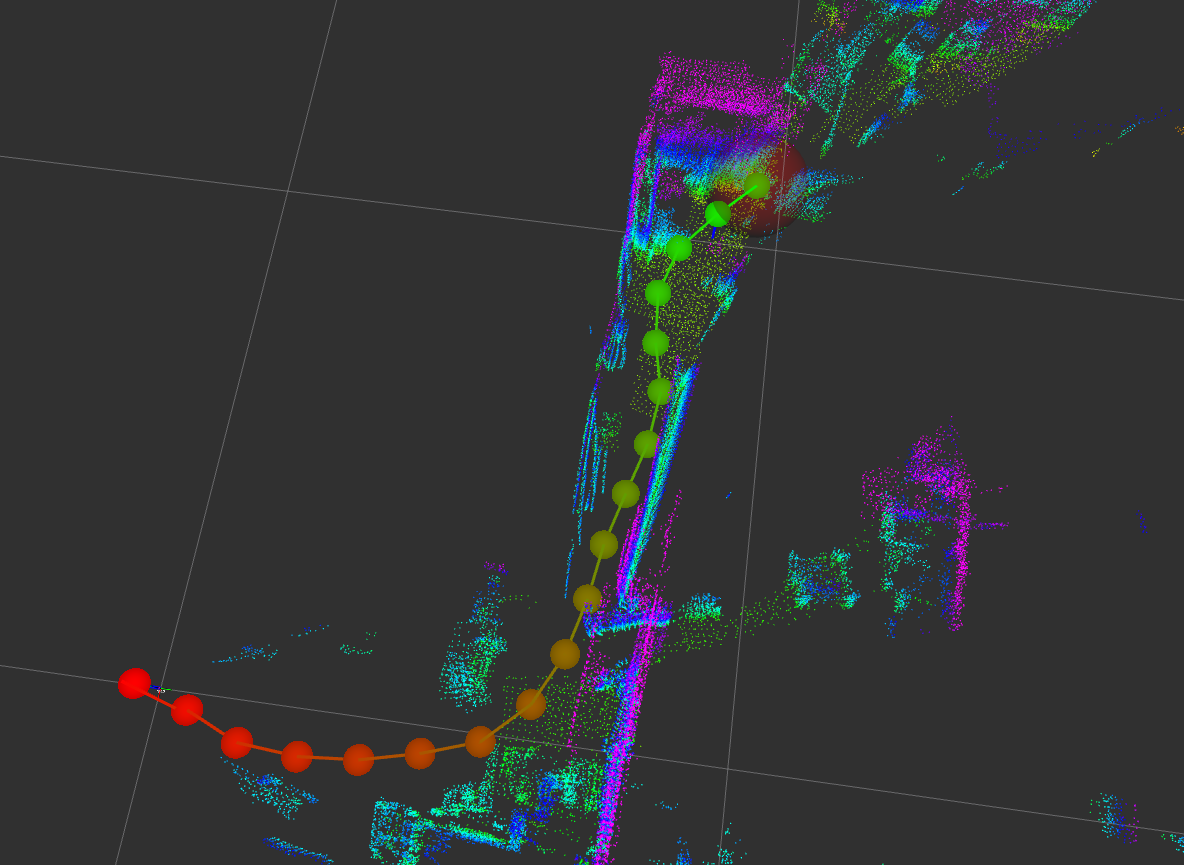
I tried 3D Localization and mapping using hdl_graph_slam. Just using the Lidar scan and odometry and I was able to localize the sensor.
Here's the link of the same question already been asked here. You'll find a thoughful answer. Personnally, I'm working on setting up the Cartographer tool. I have a 3D Ouster 64.
Asked: 2019-06-14 02:40:54 -0600
Seen: 3,056 times
Last updated: Dec 30 '21
Best toolchain for recording kinect data and converting to pointcloud offline?
how to bind a callback to include a MessageEvent [closed]
Proper source of xncore for compiling svn opencv with openni support?
ROS support for industrial robotic arms?
When should I use topics vs services vs actionlib actions (vs dynamic_reconfigure)?
Significance of ros::spinOnce()
How to put Hokuyo laser sensor on p2os?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.


What have you tried so far? Is your lidar sensor moving? Do you have any other sensors in the rosbag as well? What sort of map do you need to generate?
We're happy to help, but you're going to have to give us a lot more information.
My lidar sensor is moving and I have only sensor information of Lidar sensor in rosbag and i wanted to generate map for autonomous driving and I have odometry information also.