
Why does pointcloud pointing upwards?

I am using a camera remotely and sending the compressed image frames to host pc. I am using RTABmap to create a 2d MAP.
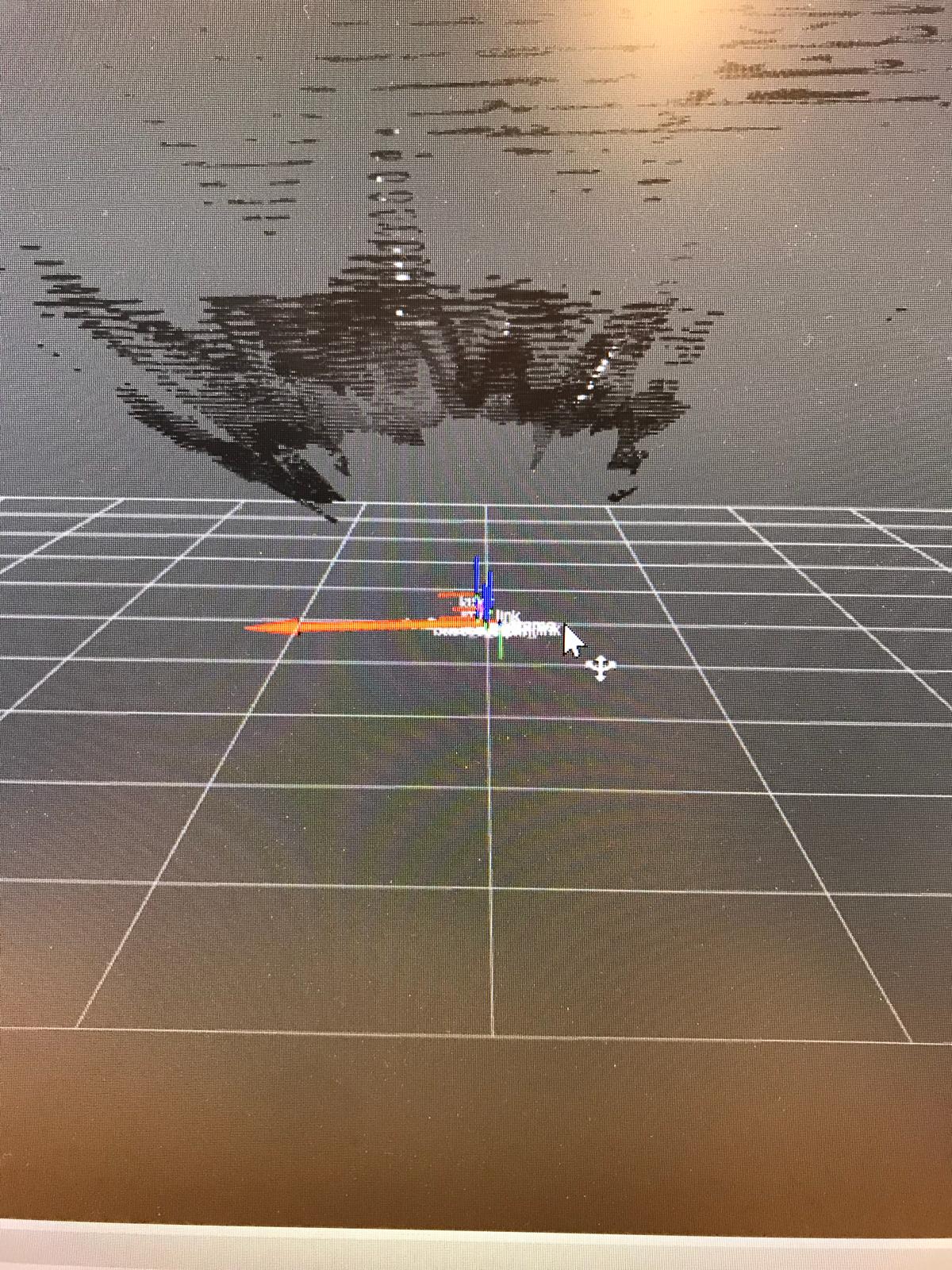
The problem occurs when the PCL is being published and the points are located above my robot. Why is that? Have a look at the picture:
My TF is normal and I am using this CPP code to send the images:
https://github.com/duo3d/duo3d_driver...
And using this launch file with static TF:
<launch>
<arg name="pi/2" value="1.5707963267948966" />
<node pkg="tf" type="static_transform_publisher" name="duo3d_base_link" args="0 0 0 0 0 01 /duo3d/camera_frame duo3d_camera 100" />
<node name="duo3d" pkg="duo3d_driver" type="duo3d_driver" output="screen">
<param name="frame_rate" value="30.0"/>
<rosparam param="image_size">[320, 240]</rosparam>
<param name="dense3d_license" value="OVMZU-ZHFE2-9K41K-NQL44-WX3DV"/>
<param name="gain" value="0"/>
<param name="exposure" value="50"/>
<param name="auto_exposure" value="true"/>
<param name="vertical_flip" value="true"/>
<param name="led" value="35"/>
<param name="processing_mode" value="1"/>
<param name="image_scale" value="0"/>
<param name="pre_filter_cap" value="8"/>
<param name="num_disparities" value="7"/>
<param name="sad_window_size" value="3"/>
<param name="uniqueness_ratio" value="2"/>
<param name="speckle_window_size" value="256"/>
<param name="speckle_range" value="2"/>
</node>
<node pkg="rqt_gui" type="rqt_gui" name="rqt_gui" args="--perspective-file $(find duo3d_driver)/launch/rqt/depth_view.perspective"/>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find duo3d_driver)/launch/rviz/depth.rviz"/>
</launch>
So why does PCL prints on top of my robot? That makes my map to be occupied everywhere.
Also, this is what PCL of obstacles look like produced by RTABMAP:
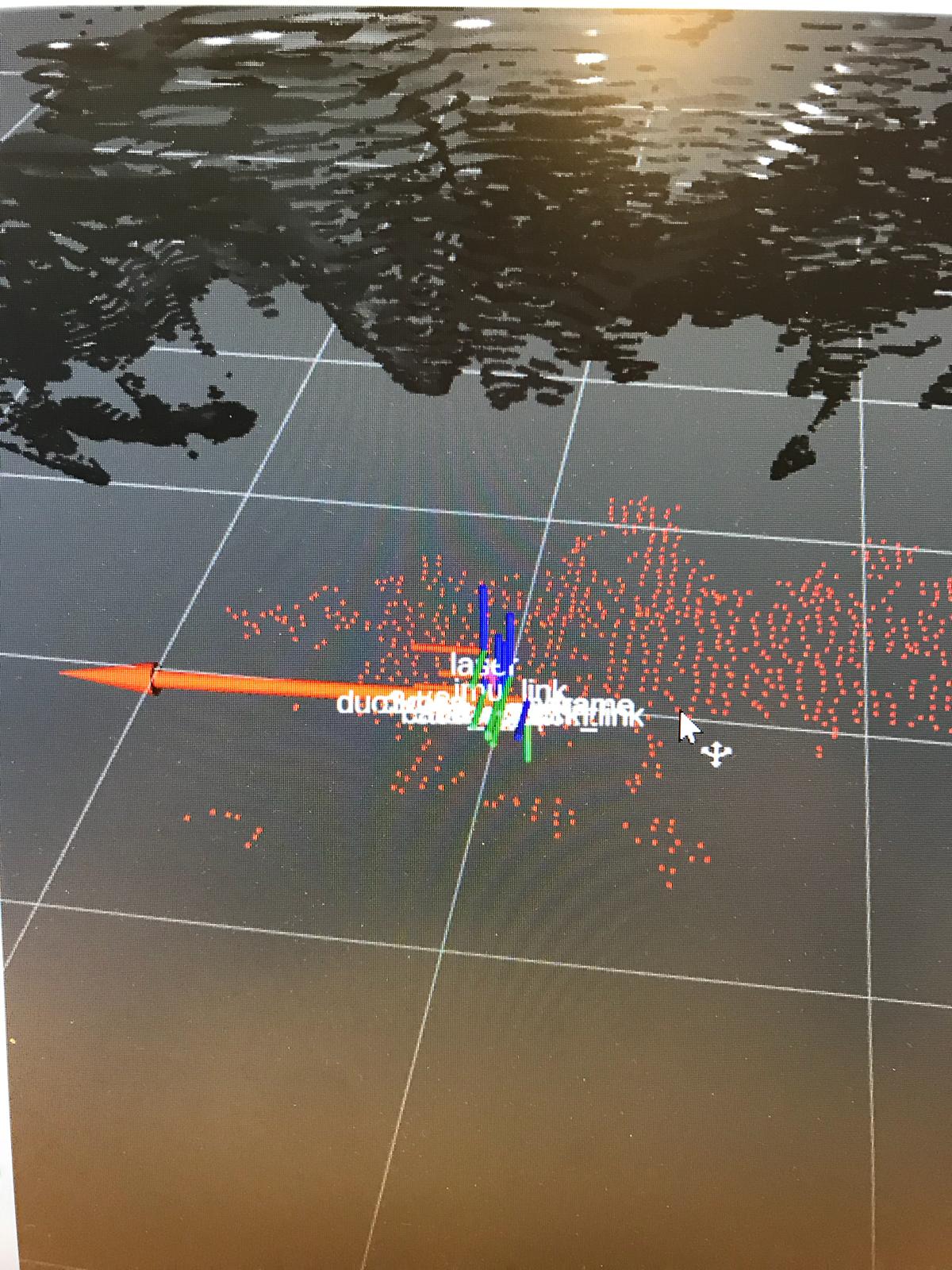
I am using default stereo_mapping launch file.
EDIT! It seems to do something with IMU but I do not know yet what is happening. When I tilt my IMU, pcl also tilts. If you can debug together with me that would be great.
My rosbag is: https://drive.google.com/file/d/1qRQr...

