
No map data for rtabmap_ros [closed]
Hello,
I'm running Ubuntu 12.04, Ros Hydro, I have rtabmap_ros compiled from source (as per instructions). I am using a stereo camera with (I think) the Stereo B configuration. I have modified the demo_stereo_outdoor.launch file accordingly, by removing the node republishing, remapping to stereo_camera namespace, and set use_sim_time to false. The rtabmap node is running when I launch this file. I also changed base_footprint to base_link.
I also set up a tf broadcaster between base_link frame and camera, and set it to a constant value (0 translation), since I am holding the camera. Now the issue is that all my rtabmap/cloud_map, rtabmap/map rtabmap/path ... (blah blah blah) topics are empty when I echo them. In rviz, my camera frame is moving around with respect to the map frame, but I cannot view the map, the path, or any clouds (optimized or not).
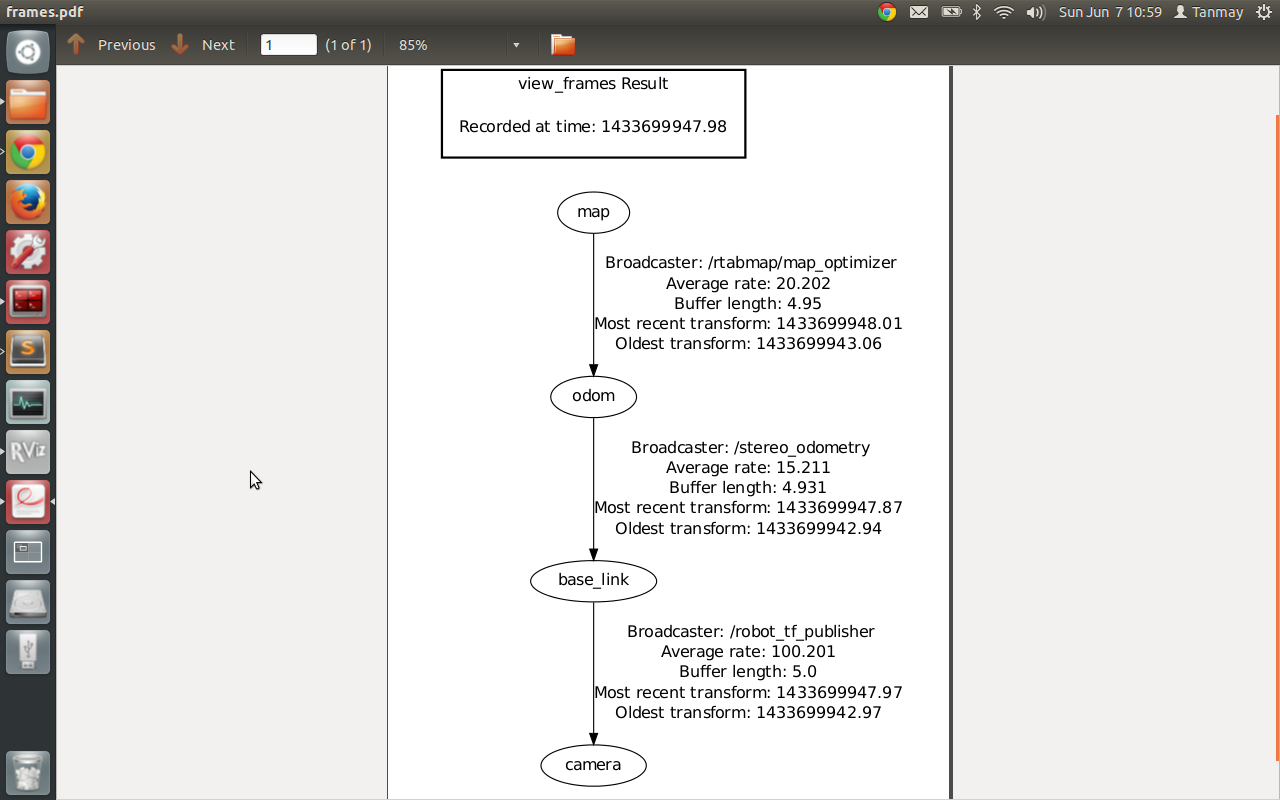
I think the issue could be arising from the following - 1) rviz file could be incorrectly set up since it is the one being used for the demo stereo outdoor. 2) tf tree / frame ID's could be incorrect. This is surprising, since my tf tree is - map --> odom --> base_link --> camera, which seems correct to me.
Also, another glitch that is occurring (but should not make a difference), is that I am supplying the camera frame id, which is an optical frame, but pointcloud frames are defined with a different orientation.
1) Any suggestions on how to solve the mapping issue? 2) Can anyone confirm what frame I am expected to supply to the node?
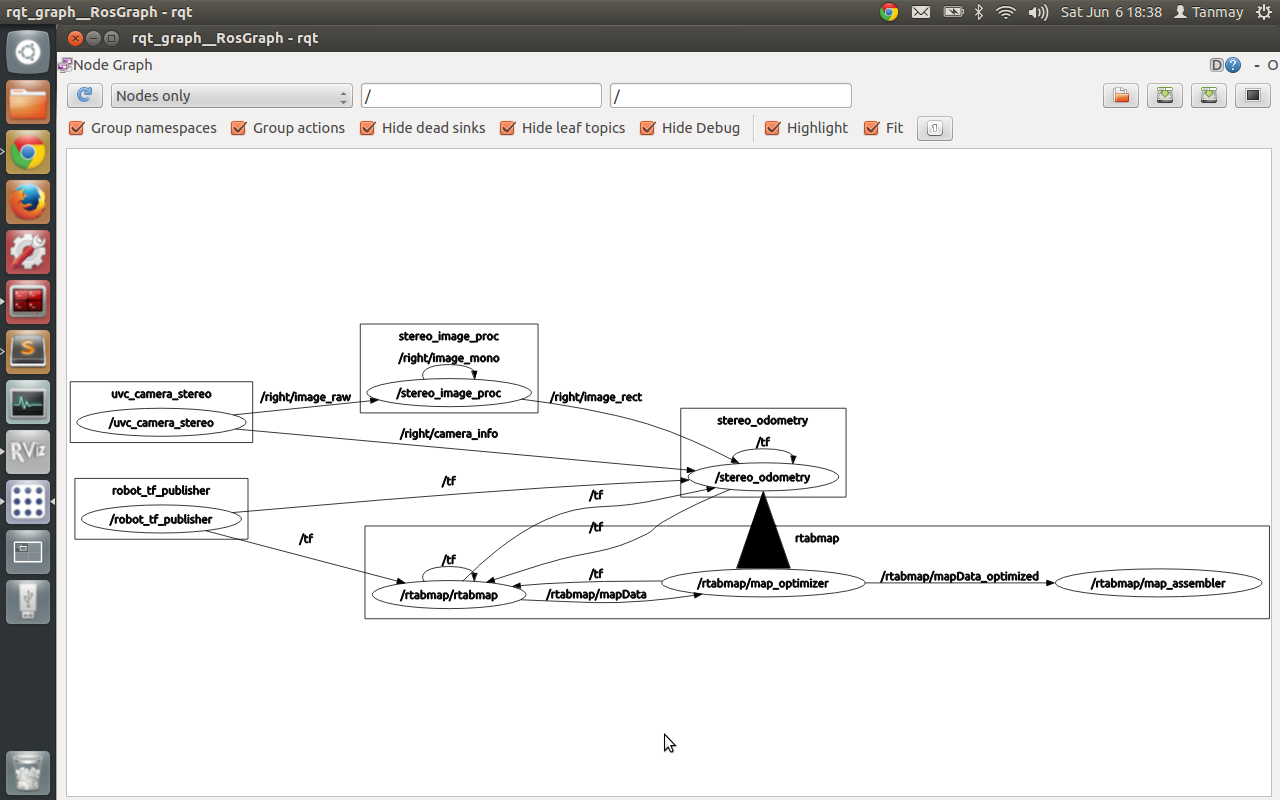
Here is my rqt_graph:
Here is my tf tree:
Thanks!
[UPDATE]
Hi Mathieu,
Sorry to bother you, my RTAB is now giving me this graph output after setting up my approximate stereo camera pair. I modified the approx params as you mentioned. I added a queue size to the rtabmap, rtabmap optimizer, and rtabmap assembler nodes. Notice how the odometry still seems to be working - I get the position of the camera too. However, I can only view /camera/points2 cloud, not the rtabmap/mapData topics or assembled clouds, etc.
Any suggestions?
I just updated the rqt_graph by adding topics to the display - here it is. It seems to be connected correctly as far as I can tell, but still no output.
Here is my launch file just in case.
<launch>
<arg name="rviz" default="true"/> <arg name="rtabmapviz" default="false"/>
<group ns="/camera">
<node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="left/image_rect"/>
<remap from="right/image_rect" to="right/image_rect"/>
<remap from="left/camera_info" to="left/camera_info"/>
<remap from="right/camera_info" to="right/camera_info"/>
<!-- <remap from="left/image_rect" to="/camera/left/image_rect"/>
<remap from="right/image_rect" to="/camera/right/image_rect"/>
<remap from="left/camera_info" to="/camera/left/camera_info"/>
<remap from="right/camera_info" to="/camera/right/camera_info"/> -->
<remap from="odom" to="/stereo_odometer/odometry"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="queue_size" type="int ...
