rtabmap: stereo + wheel/imu odometry
Hey everyone! I need to launch rtabmap with a stereocamera (NOT kinect!). I also have odometry from other sources (imu and wheel odometry). I want to use the latter to enhance the quality of stereo registration and mapping.
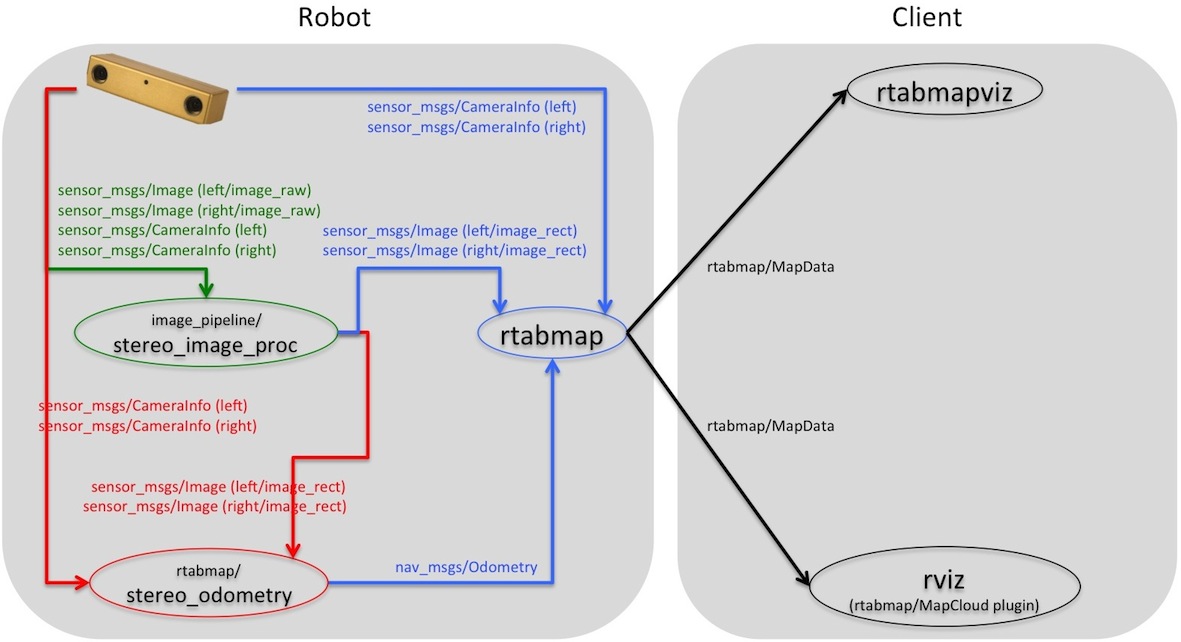
As shown in the link http://wiki.ros.org/rtabmap_ros/Tutor... it is possible to use kinect + other odometry source. However, for the stereocamera, there are no examples of how to use outer odometry.
My question is, is that possible, and if it is, how I I do it? Your replies are much appreciated!
add a comment