
Sensor doesn't move from an initial pose for navigation stack
Hi to all.
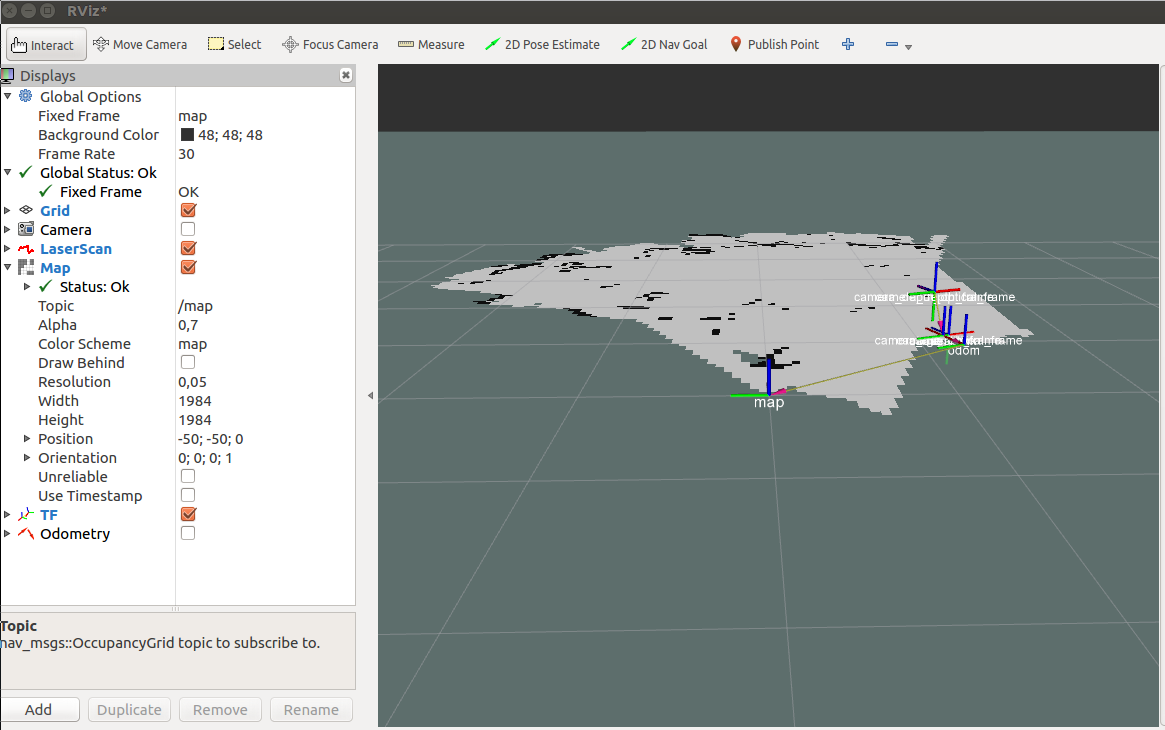
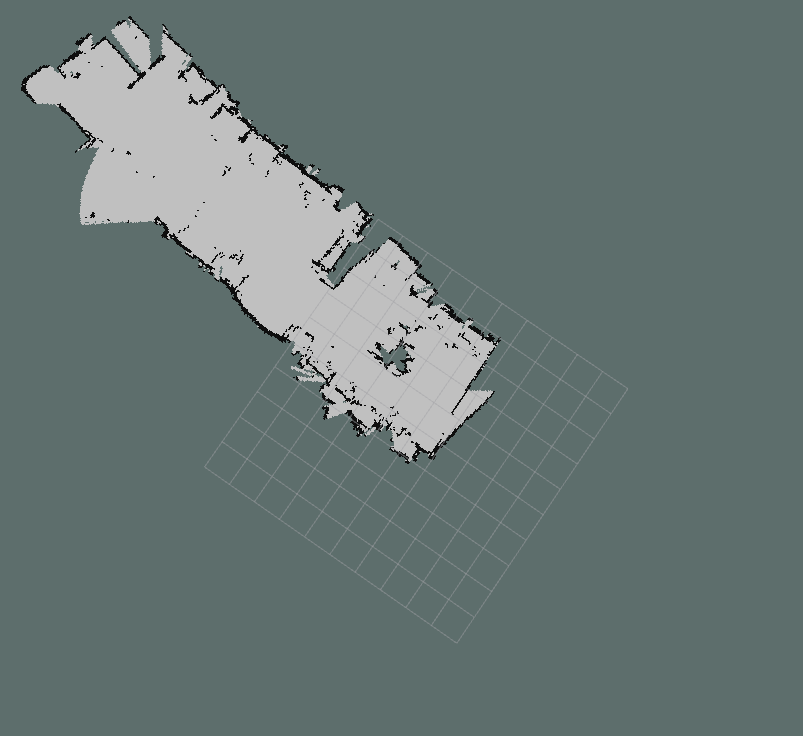
I'm having some troubles trying to make a map. I'm driving the wheeled robot by teleop_twist_keyboard and it moves around, but the vision sensor (kinect) seems doesn't detect itself inside the map. It only actualizes what it sees in front of it, even if rotates. Here are the portions of map I got.

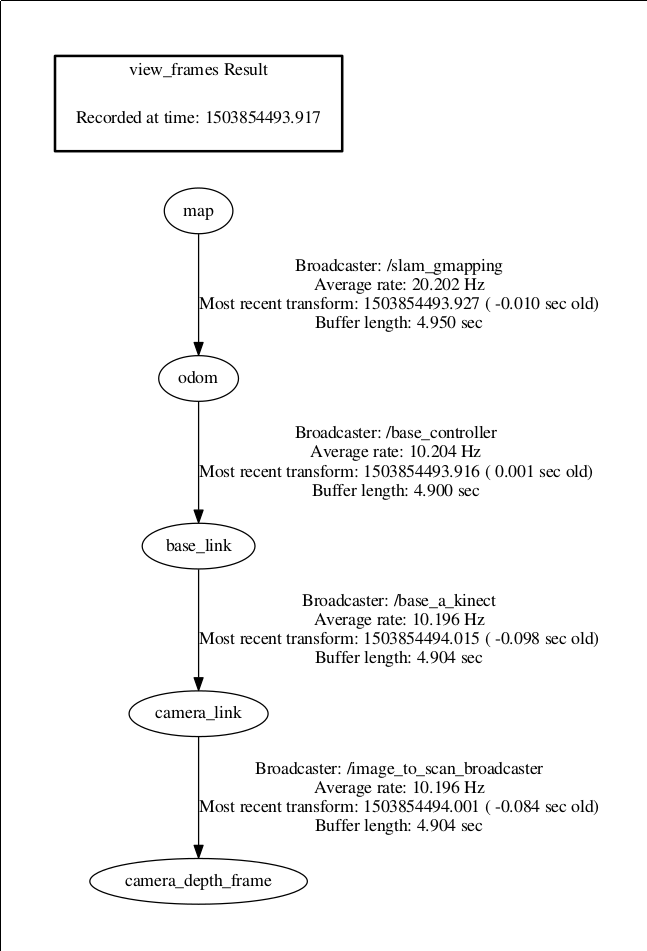
My tf tree
And here the files I have for my project
https://github.com/gersonos/Yirsoon_e...
Which parameters should I change in order to make the sensor moves in combination with the robot? Maybe inside Rviz?
------------------------------------------------------------------UPDATE----------------------------------------------------------------
On github I attached the files I'm using as All files for navigation and the tf_tree I got. Also I added some pictures of terminals used and fragments of the map I got. As you can see is set only looking in one direction, even if it moves and rotate.
What can be the problem I have on my files? I've tried to change lots of parameters that could affect it performance without sucess.
------------------------------------------------------------------UPDATE2--------------------------------------------------------------
On my github page I attached some pictures of rostopic echo values that it shows. Which are the following:
https://github.com/gersonos/Yirsoon_e...
rostopic echo /scan
rostopic echo /odom
rostopic echo /rpm
rostopic echo /cmd_vel
rostopic list -v
rqg_graph
As you can see, for /scan topic there are a lot of "nan" and numbers for rangers. There, only ranges seems change. Maybe angle_min | angle_max are the responsables of my issue.
For rostopic echo /odom, only changes x position and x linear for it covariance when it moves around. And it's only detecting forward movement because of my problem, so...it's OK.
For rostopic echo /rpm, the z vector is always on 0.1 but x vector increase when it's moving and it should be OK.
/cmd_vel also print the the suppostly given speed which is 0.04 [m/s] and a turn of 0.1[rad/s] when changes it directions, so no problem.
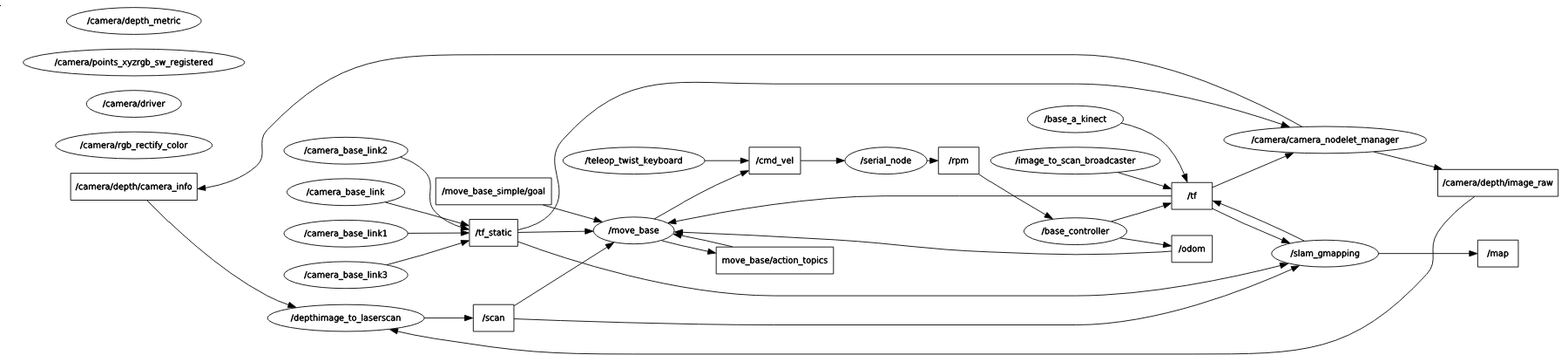
For rostopic list I attached only the suscribed topics used for you can see, and as a complement of that the rqt_graph.
http://imgur.com/a/nF2Xe (Rqt_graph I have)
------------------------------------------------------------------UPDATE3--------------------------------------------------------------
After playing with the parameters I managed to solve my odometry problem. Now I'm able to generate a more accurate map. By the moment isn't good at all, but close to what it should be.
Thanks

Could you please post the images on an image hosting site such as imgur (unless you are given enough karma to post them here)? I'm a bit reluctant to download random files from the internet.
Thanks, here are some pictures http://imgur.com/a/FbGaj
Also, please upload your code to a hosting site such as https://github.com (and possibly put relevant code here) because I have to download your code in order to read it (and like I said earlier I don't download random files from the internet).
How long were you mapping for? Sometimes it takes a bit for things to get settled and rviz to show you moving around your map.
Here is the github link for the files I created. https://github.com/gersonos/Yirsoon_e... and thanks, is a great tool for sharing files for projects like this. I was mapping a while, but for now without sucess. Hope it helps to you to find what can be the problem.
You know... maybe inside rviz for
LaserScanI should modify other parameters likeDecay time,Size, etc. There I only choose the/scantopic as well/odomand/maptopics for those display options.Decay time and size will only help with visualization in rviz.
How are you running everything? Can you update your question with that and any relevant terminal output.