
Gazebo and move_base problem
Hello
I'm using Ubuntu 12.04 and ROS fuerte
I' simulating SLAM using gazebo and I followed Learning ROS book.
Now I reached move_base.launch but when I run it, it gave the following errors:
[ WARN] [1432083250.106400281,
919.561000000]: Waiting on transform from /base_footprint to /map to become available before running costmap, tf error: [ WARN] [1432083251.263770834,
923.948000000]: No laser scan received (and thus no pose updates have been published) for 923.948000 seconds. Verify that data is being published on the /scan topic.
Although, I proved that the laserscans are published by using:
rostopic echo scan
This is move_base file:
<launch>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find simulation)/maps/gazebo_map.yaml" output="screen">
</node>
<include file="$(find amcl)/examples/amcl_diff.launch" >
</include>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find simulation)/launch/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find simulation)/launch/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find simulation)/launch/local_costmap_params.yaml" command="load" />
<rosparam file="$(find simulation)/launch/global_costmap_params.yaml" command="load" />
<rosparam file="$(find simulation)/launch/base_local_planner_params.yaml" command="load" />
</node>
</launch>
and this is my tf tree:
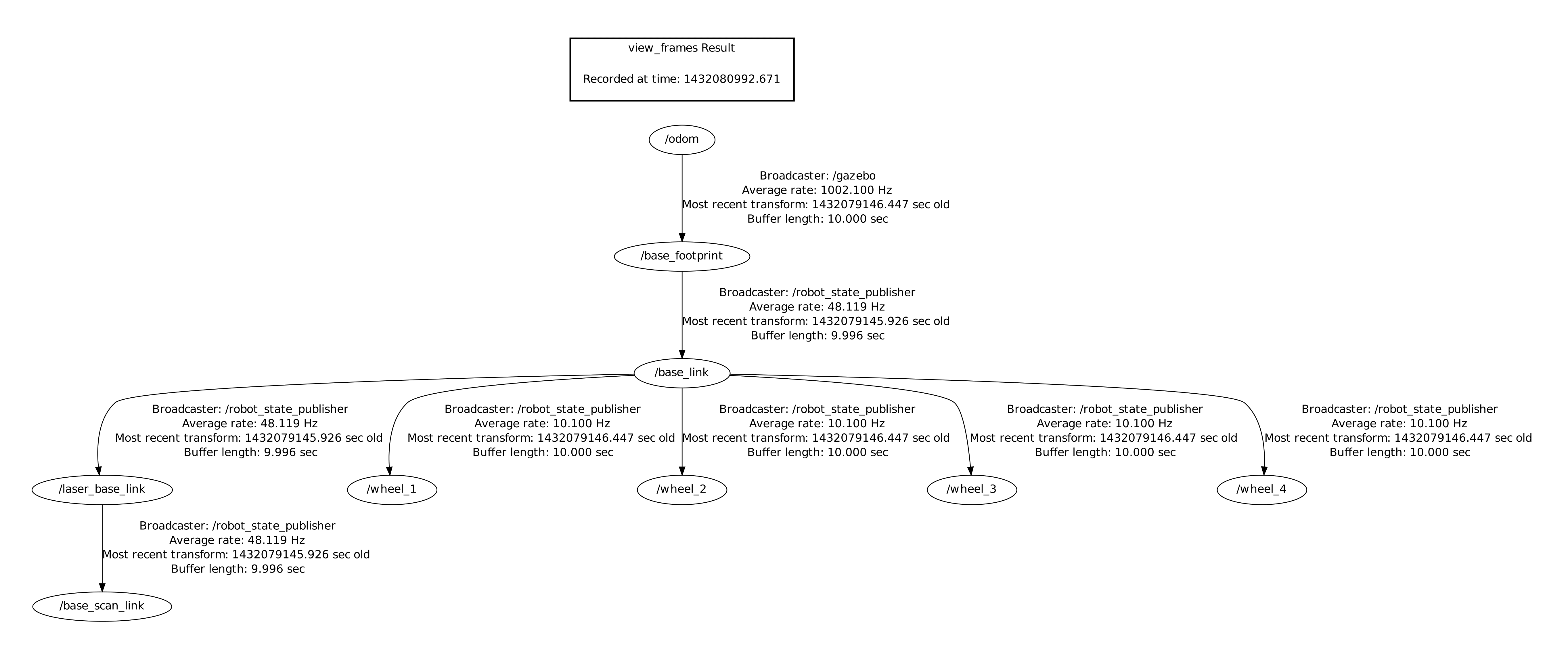
Any idea?
Thank you.
add a comment

