
a global and local map question
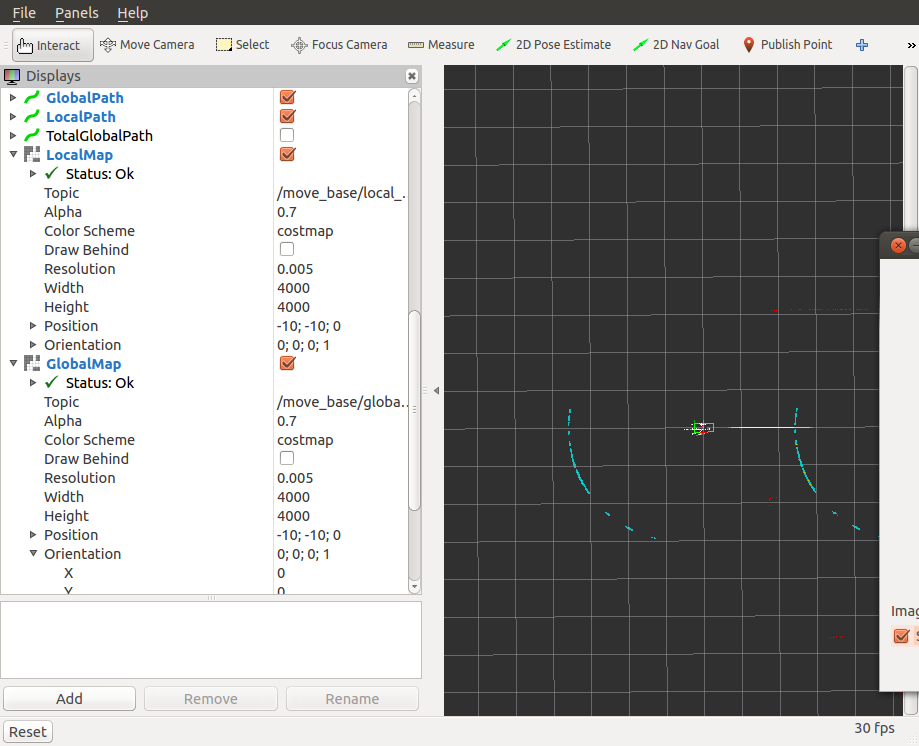
In the image below there are two blue crest. If I toggle off the global map panel then the right one disappears. If I toggle off the local map panel then the left one disappears. My global static map in the map server is blank so the image is real-time! Why are these not aligned?
rosmap.yaml for map server
image: rosmap.pgm
resolution: 0.005000
origin: [-10.000000, -10.000000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
costmap_common_params.yaml for common costmap parameters
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[0.25, 0.1], [0.25, -0.1], [-0.25,-0.1], [-0.25, 0.1]]
max_scaling_factor: 0.02 # The scalling factor for footprint defined in local costmap
inflation_radius: 0.02 # Propagating cost values out from occupied cells that decrease with distance.
map_type: costmap
track_unknown_space: true
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: hokuyo_frame, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
resolution: 0.005
local_costmap:
global_frame: /odom
robot_base_frame: /base_link
update_frequency: 10.0
publish_frequency: 10.0
static_map: true
rolling_window: false
width: 16.0
height: 16.0
origin_x: -8.0
origin_y: -8.0
global_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 30.0
publish_frequency: 30.0
static_map: true
width: 20.0
height: 20.0
origin_x: -10.0
origin_y: -10.0
Static map:



You should add how you configured your costmaps, especially their origins and staticness.
I updated question with this information,