
viso2 camera configuration

Hi, I'm trying to use viso2(viso2_ros).
Especially, I'm interested in stereo odometer.
I've already read wiki(http://www.ros.org/wiki/viso2_ros?distro=groovy(http://www.ros.org/wiki/viso2_ros?distro=groovy))
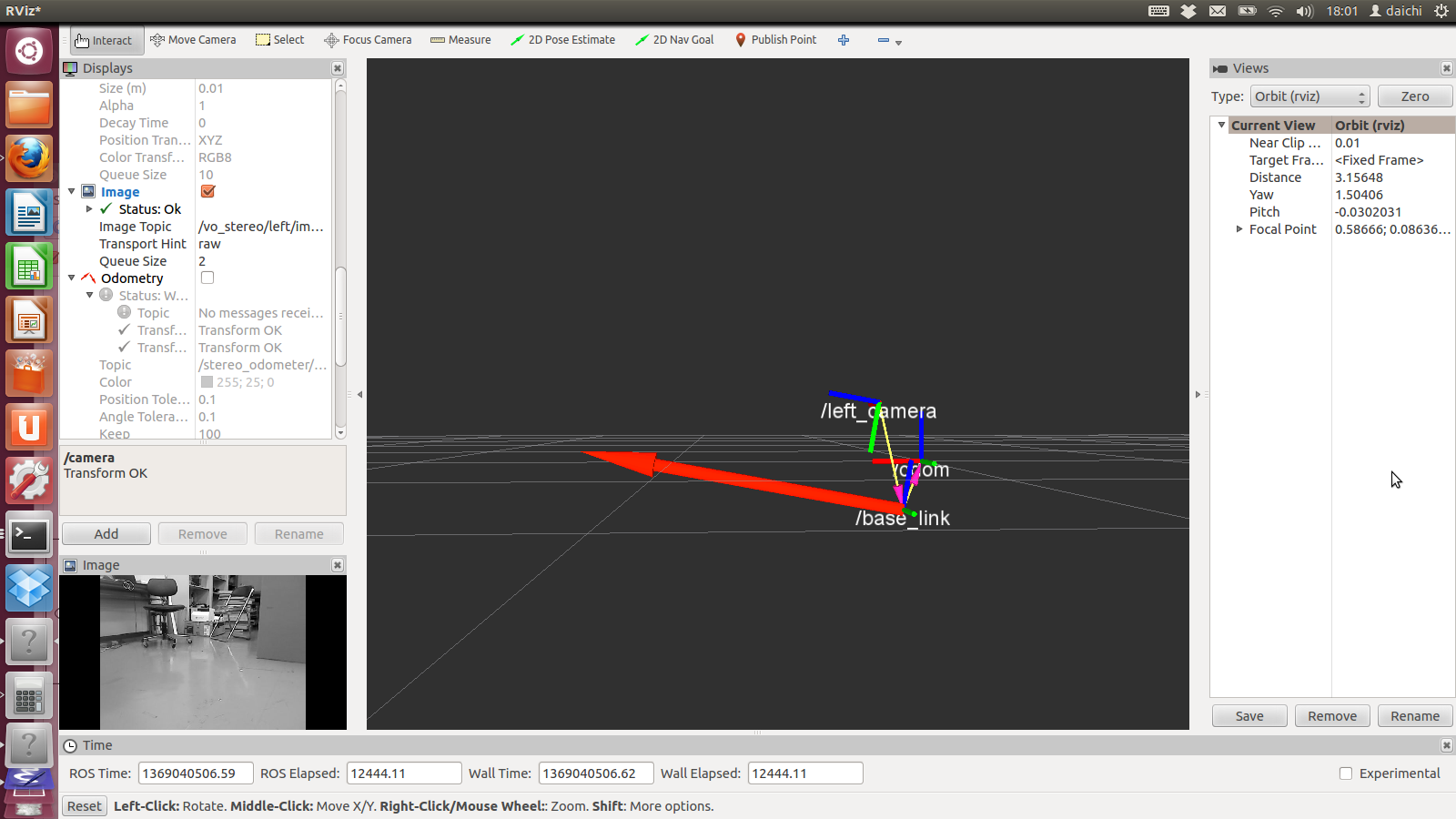
and tried to setup correctly as I mentioned here(See screenshot or reffer to http://answers.ros.org/question/62872/viso2_ros-shows-visual-odometer-got-lost/)

But, it doesn't work well.
I have some questions as followings.
If you have some ideas, could you tell me answers ??
- Does "/camera" frame mean coodinate fixed in left camera ?
- camera_frame_id for left camera and camera_frame_id for right camera are the same ?
- Transformation from the robot's reference point (base_link in most cases) to the camera's optical frame should be published. In this case, does camera's optical frame mean left camera's one ?
- I calibrated stereo camera with "camera_calibration" package(http://www.ros.org/wiki/camera_calibration/Tutorials/StereoCalibration). Is it all right ?
- In wiki, viso2_ros is said that it requires a wide angle camera.
I'm using logicool Webcam C600 whose angle is 75[deg]. Is it enough ? - I can see estimated pose in rviz. However, it gradually directs upward(See screenshot). Why ? Should I set the camera downward slightly(For example, 10[deg]) ? (http://answers.ros.org/question/44232/stereo-libviso2-doesnt-seem-compute-an-accuracy-odometry/)
Thank you in advance.


{kind=link}
Thank you for editting this topic's name !