
RViz odometry arrows displaced from base_link
Hello,
I'm observing a phenomenon in RViz that I did not think was possible. I'm using a Python script to move a TurtleBot around a square and I'm monitoring the motion using RViz on my desktop computer. Both machines are running the latest Electric debs and the TurtleBot runs Ubuntu 10.04 while the desktop runs 11.10. Both machines are time synced using ntpdate to a common server (ntp.ubuntu.com).
The phenomenon is illustrated in the image below.
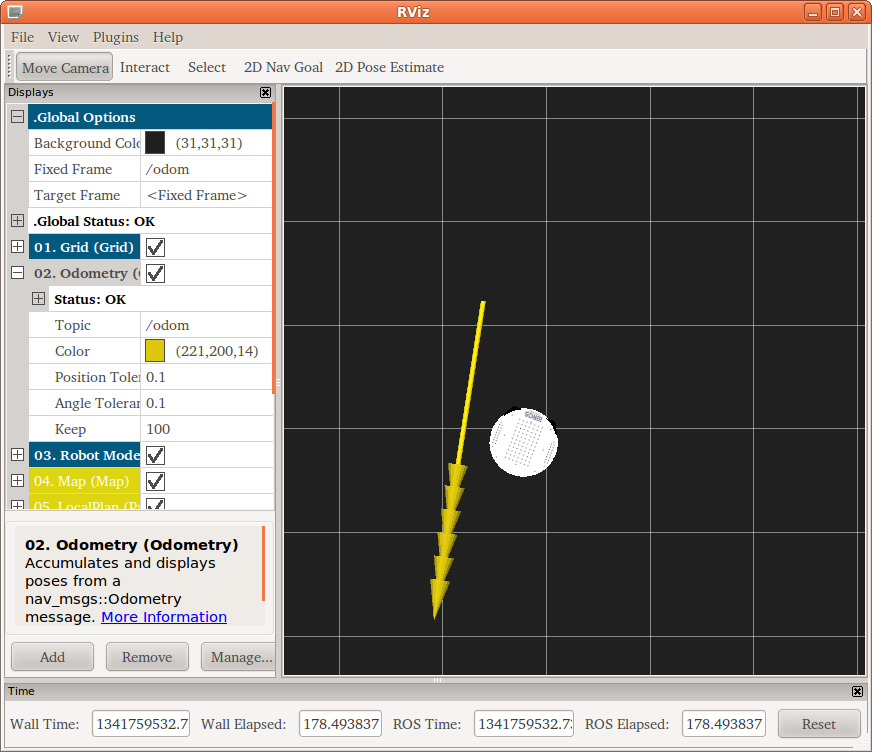
As you can see, the Odometry arrows become detached from the robot base. This happens a few seconds after I start the robot moving and the degree of displacement can vary over time. The image here shows a particularly large displacement. I didn't think this was possible since I'm viewing the motion in the /odom frame. Also, I was unable to reproduce the problem when running the same experiment on a different base controller (ArbotiX) on a different robot.
I'm guessing I am missing something fundamental about the connection between the /odom frame and the base_link frame of the robot: can someone straighten me out?
Thanks!
patrick

Perhaps the /tf messages are being delay over a wifi link?