
DWA doesn't avoid obstacles
Hello,
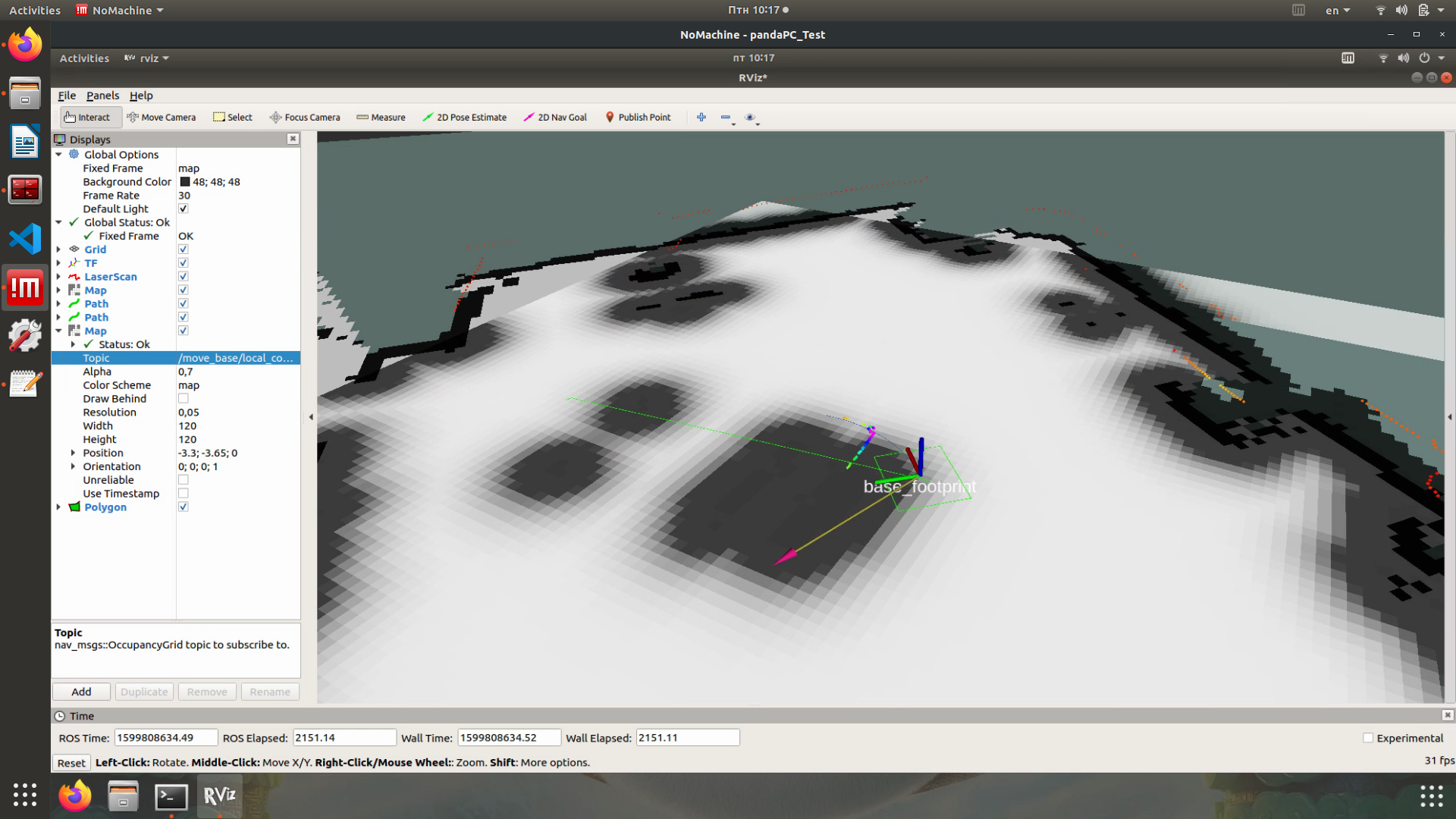
The dwa with navigation stack does not avoid obstacles. And I am completely stuck. For DWA I even have tried default parameters and the next screenshot was done with default for DWA.
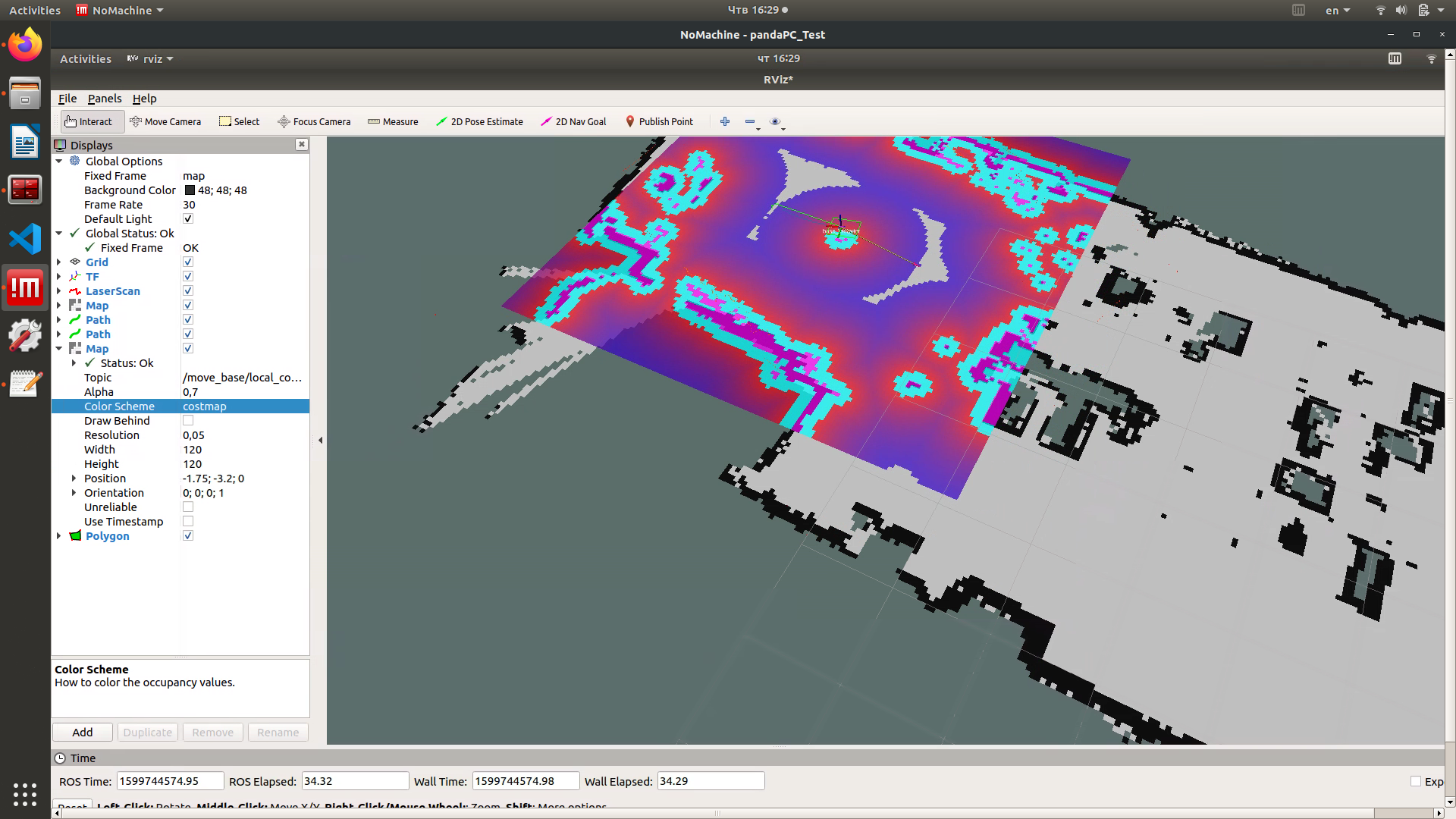
Does anyone have a suggestion? Thank you!
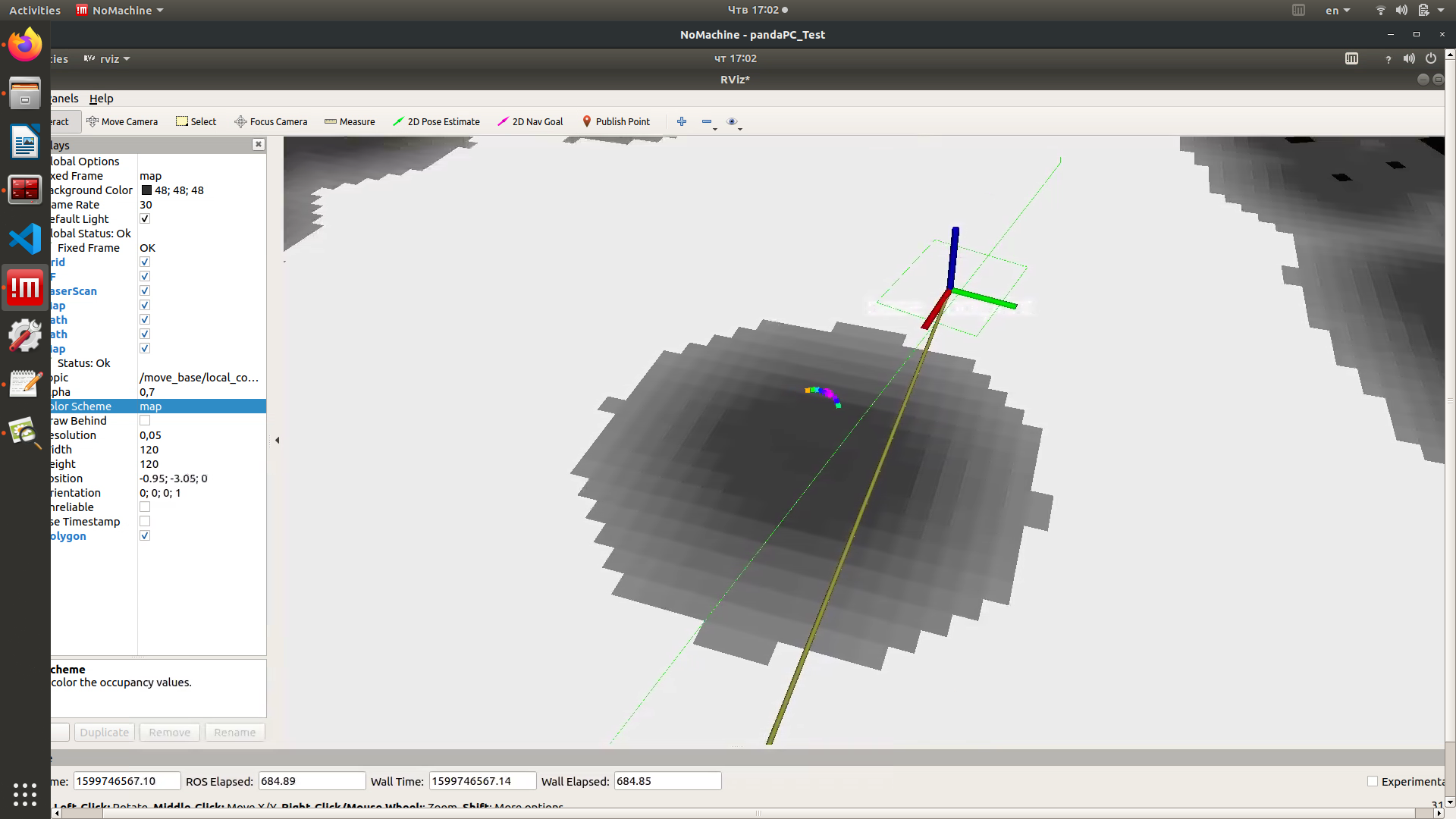
EDIT 1
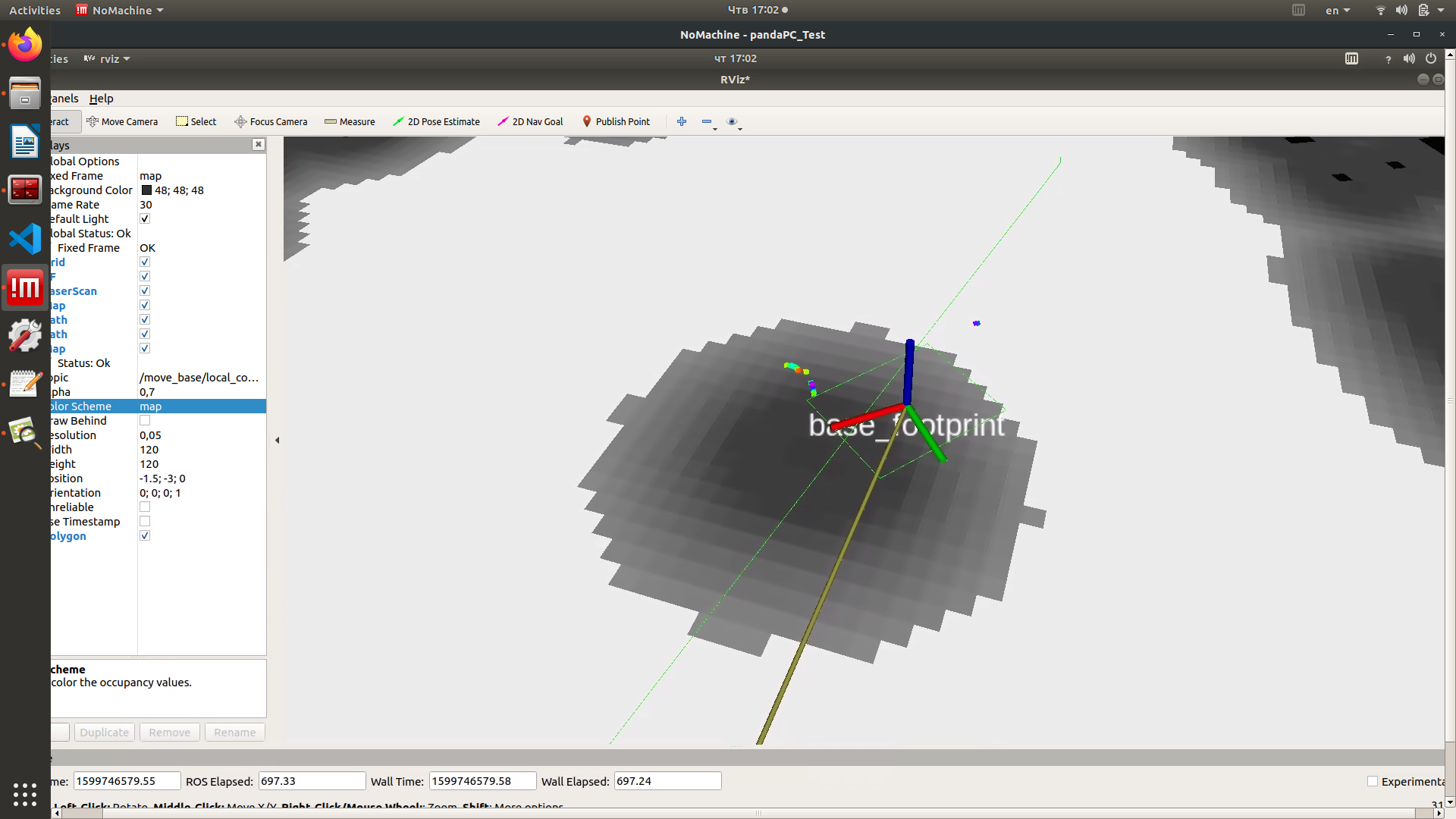
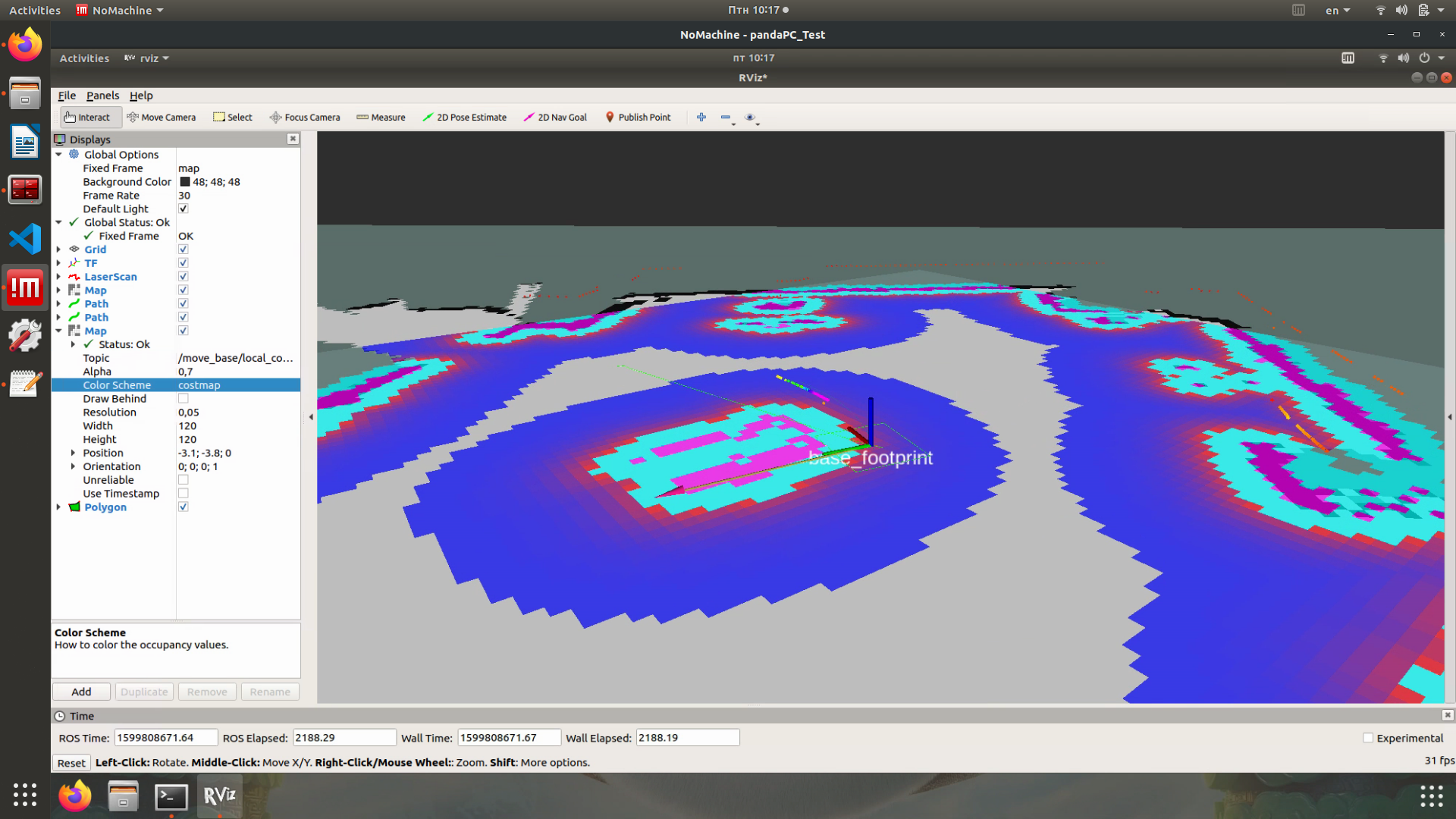
EDIT 2
add a comment
