Navigation w/ 4 wheeled mobile manipulator
Hi,
I have made an open mobile manipulator project ~1000 working both in simulation and reality.
I have some problems with the navigation both in simulation and in reality (but here i will focus on simulation) here is my project https://github.com/panagelak/Open_Mob... which you can easily hopefully build in melodic after you install the depedencies (i have some instructions)
so the xacro of the robot begins here https://github.com/panagelak/Open_Mob...
The wheel macro is here https://github.com/panagelak/Open_Mob... I think i have set them up correctly with the gazebo mu1,mu2,kp etc properties
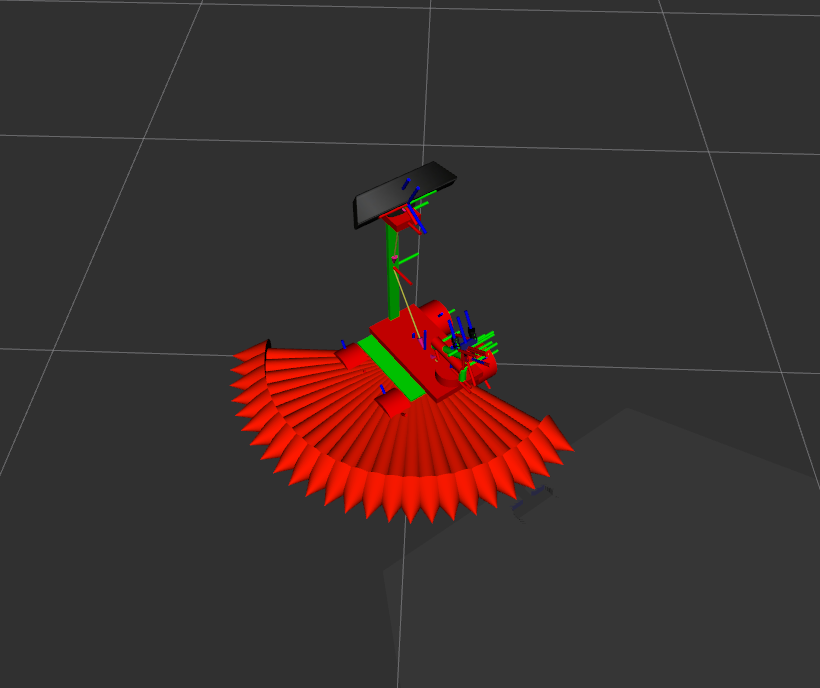
here is the move base config using trajectory base local planner (no dwa) https://github.com/panagelak/Open_Mob...
with roscd safe_spawner and ./safe_spawner_navigation will launch the system for navigation (check to see what it launches) make sure you have installed prerequisities for xterm emulator sudo apt-get update -y sudo apt-get install -y x-terminal-emulator
I use the diff_drive_controller https://github.com/panagelak/Open_Mob...
But navigation has problems.. Also the diff drive controller doesn't rotate the robot well (it kind of oscillates) you can run the ./safe_spawner_drive.sh script
Let me know if someone wants to Help me and is up for the Challenge to make it navigate as a champ xD
Thanks a Lot