
Problem with local planner using navigation stack
Hello guys,
I am trying to run my robot with navigation stack. It is a four track differential robot as it is shown in the picture below. I am using gmapping instead of amcl so I will discover and update the map as I go along.
I followed all the step in navigation stack tutorial and my mapping and localization seem to work fine.
However, there are some issues:
1- under local_costmap topic I have neither obstacles nor inflated obstacles. instead I have this:
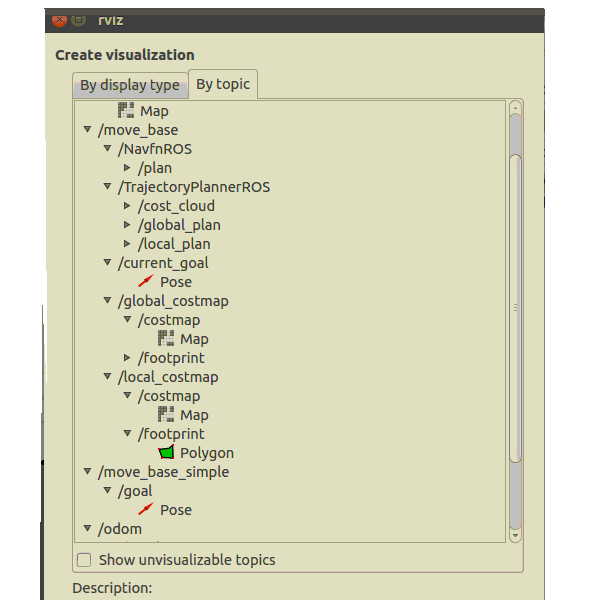
2- when I send a goal to navigation stack the global path is fine, but strange curly local path is being created and the robot as a result wanders around the global path. Please take a look at this video that I recorded of my screen.
I am considering everything 2D so in the TF tree (base_link - base_laser) I ignore height of the my laser scanner. Here is my parameters:
cost_map common parameters
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[0.5, -0.45], [-0.5, -0.45], [-0.5, 0.45], [0.5, 0.45], [0.6, 0.0]]
#robot_radius: ir_of_robot
inflation_radius: 0.1
observation_sources: SICK
SICK: {sensor_frame: base_laser, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
global_costmap:
global_frame: /map
robot_base_frame: base_link
update_frequency: 3
static_map: true
map_type: costmap
local_costmap:
global_frame: odom
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
map_type: costmap
TrajectoryPlannerROS:
max_vel_x: 0.25
min_vel_x: 0.1
max_vel_theta: 0.5
min_in_place_vel_theta: 0.2
acc_lim_theta: 1.2
acc_lim_x: 1.5
acc_lim_y: 1.5
xy_goal_tolerance: 0.2
yaw_goal_tolerance: 0.09
holonomic_robot: false
meter_scoring: true
sim_time: 0.5
sim_granularity: 0.025
angular_sim_granularity: 0.025
vx_samples: 3
vtheta_samples: 20
Any ideas how to solve the problem?
Thank you very much in advance :)
