troubles with local planner
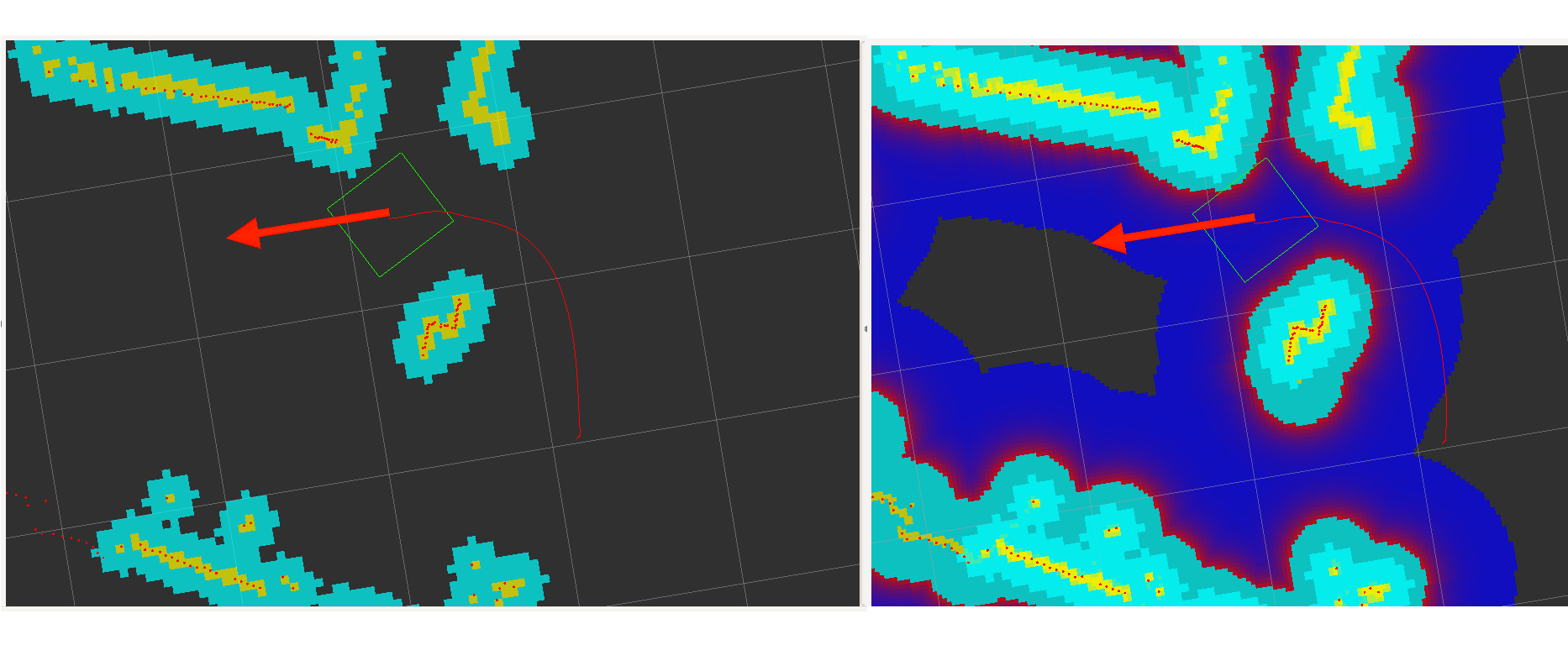
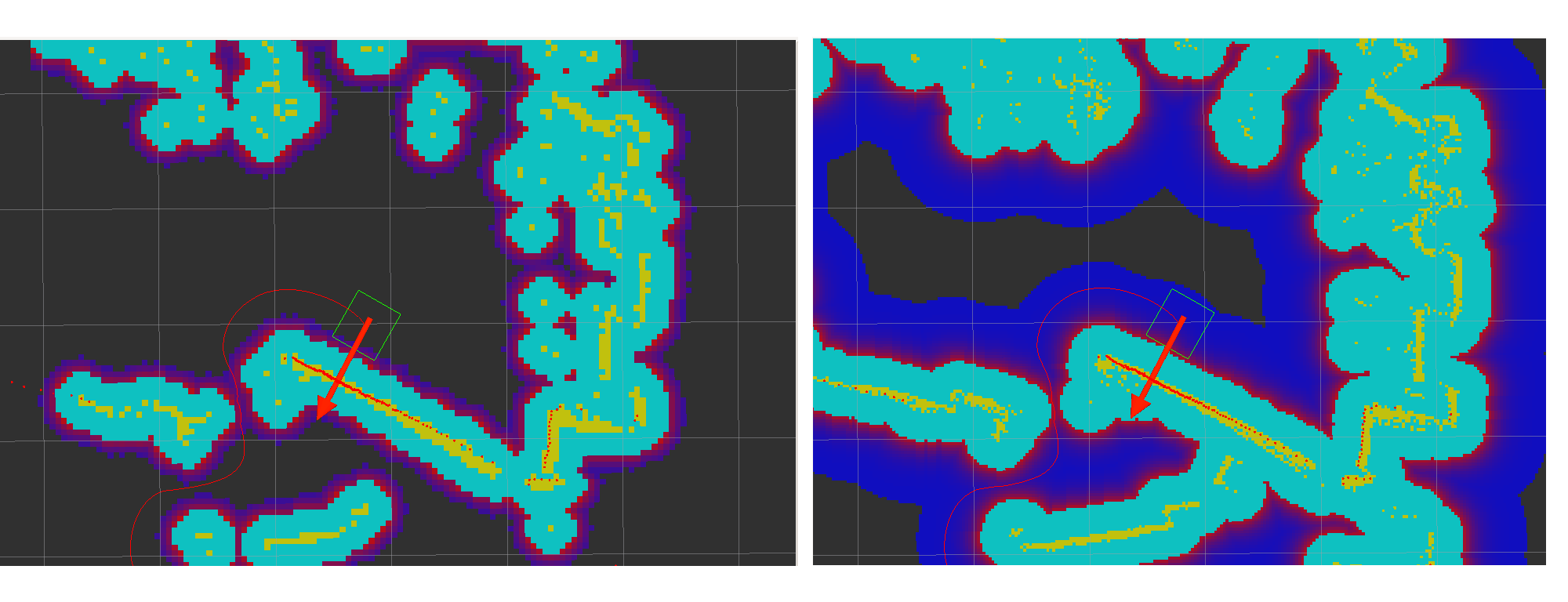
Hi, I am on Ubuntu 14.04 ROS indigo, SLAM gmapping, real robot ROBULAB 10 I am having troubles with base_local_planner! Using move_base package, and I am giving a 2Dgoal in RVIZ, when the robot is close to obstacles the local planner can't generate the local path in order to follow the global one. However, my robot is not holonomic and it can rotate in place or move back to be fare from obstacles (I set min_in_place_vel_theta: 1.4). Now I am not sure if I am doing some mistakes somewhere in my config. files or the /move_base/base_local_planner (which is set to : base_local_planner/TrajectoryPlannerROS) is not able to generate a rotation or move back in order to be able to generate a safe local path? My configurations for the launch file, common, local, global cost maps and trajectory generation and two images (local cost map on the left and global cost map on the right) are bellow Any help will be well appreciated !
=======================[ LAUNCH FILE ]====================
<arg name="sensor_range" default="2.0"/>
<arg name="use_sim_time" default="false" />
<param name="/use_sim_time" value="$(arg use_sim_time)"/>
<arg name="show_rviz" default="true" />
<arg name="map_size" default="202"/>
<arg name="bringup_robulab" default="true"/>
<include file="$(find robulab)/launch/bringup.launch" if="$(arg bringup_robulab)"/>
<include file="$(find robulab)/launch/gmapping.launch">
<arg name="bringup_robulab" value="false"/>
<arg name="show_rviz" value="false"/>
</include>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find robulab)/rviz_cfg/exploration.rviz" if="$(arg show_rviz)"/>
<node pkg="move_base" type="move_base" respawn="true" name="move_base" >
<param name="controller_frequency" value="20"/>
<param name="planner_frequency" value="20"/>
<param name="global_planner" value="BaseGlobalPlanner"/>
<remap from="base_scan" to="scan"/>
<remap from="cmd_vel" to="command_velocity"/>
<rosparam file="$(find robulab)/yaml/costmap_common_robulab.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find robulab)/yaml/global_costmap.yaml" command="load" />
<rosparam file="$(find robulab)/yaml/costmap_common_robulab.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find robulab)/yaml/local_costmap.yaml" command="load" />
<rosparam file="$(find robulab)/yaml/trajectory_planner_robulab.yaml" command="load"/>
<!-- rosparam name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find robulab)/yaml/dwa_loca_planner_robulab.yaml" command="load"/ -->
</node>
=======================[ COST MAP COMMON ]====================
map_type: costma
/# Map management parameters
unknown_cost_value: 255
min_in_place_vel_theta: 2.0
/# Sensor management parameters
observation_sources: base_scan
base_scan: {sensor_frame: laser, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
=======================[ COST MAP LOCAL ]====================
local_costmap:
map_type: costmap
global_frame: /map
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
origin_x: 0.0
origin_y: 0.0
inflation_radius: 0.35
=======================[ COST MAP GLOBAL ]====================
global_costmap:
global_frame: /map
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
raytrace_range: 3.0
obstacle_range: 2.5
static_map: true
rolling_window: false
#inflation_radius: 1.8
inflation_radius: 2.0
=======================[ TRAJECTORY PLANNER ]====================
TrajectoryPlannerROS:
/#Robot Configuration Parameters
max_vel_x: 0.305
back_up_vel: -0.2
acc_lim_x: 0.2
max_vel_theta: 0.65
min_vel_theta: -0.65
min_in_place_vel_theta: 1.4
holonomic_robot: false
/#Goal Tolerance Parameters
/#Trajectory Scoring Parameters
occdist_scale: 0.02
publish_cost_grid_pc: true
heading_lookahead: 0.2
vtheta_samples: 150