
Morphology link structure (xyz, rpy) for creating urdf model from solidworks
Hello, i was wondering about defining robot structure (xyz and rpy) in urdf using solidworks or another cad software. I use the example of gurdy robot. the morphology of Gurdy’s link structure can be seen on the image below :
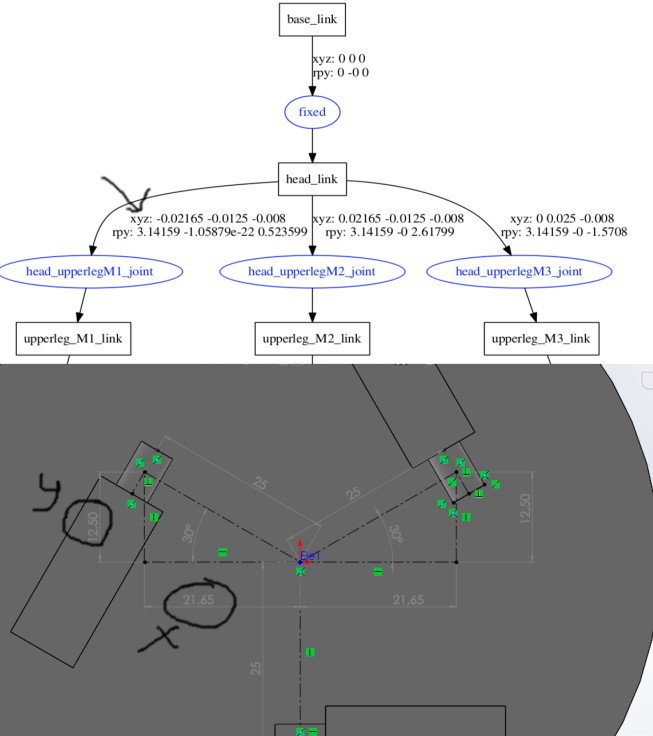
In defining robot structure in xyz, i can directly got the xyz from the solidworks, like the image. (and z is the height from the base to the link, right?) But how can i know the rpy directly from the solidworks?
Thank you so much.
add a comment
