
Rtabmap does not produce 3D map

Hello all,
I am having problems with RTABMAP (0.19.3) in ROS Melodic. I am using a stereo camera setup on a simulated car in gazebo.
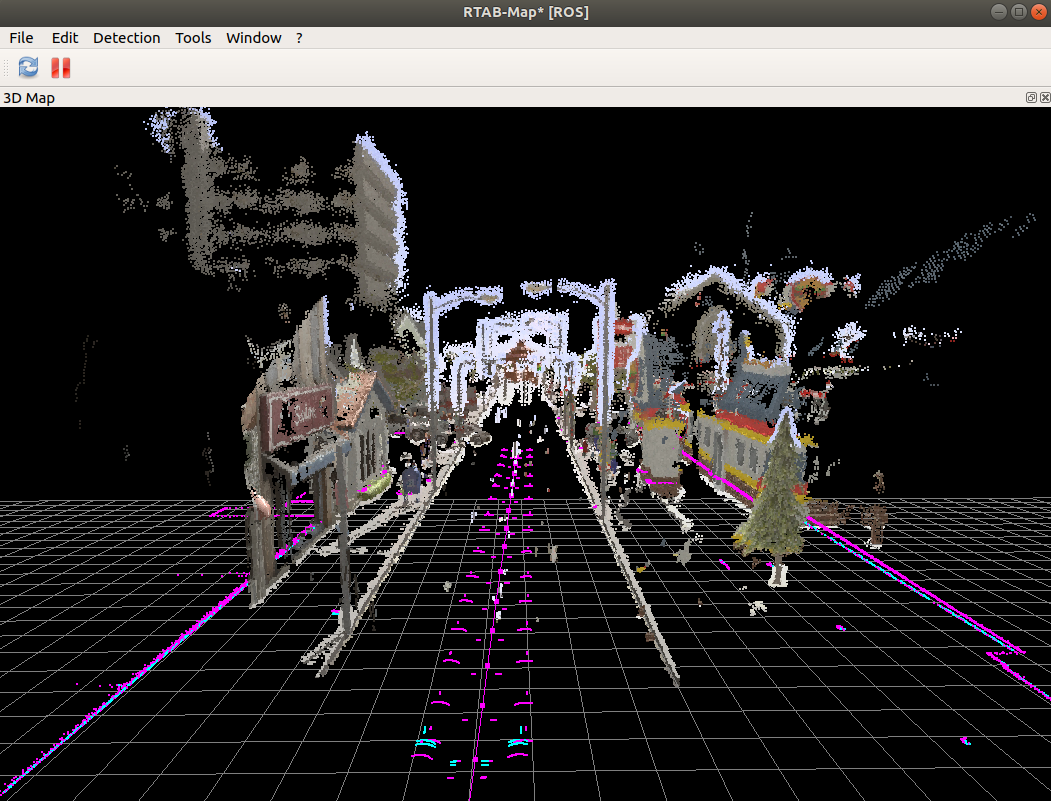
Here are four images that visualize my problem: link
The first two are before the car moves and the other two after the car moved.
As can be seen only the nearest detected points are used to generate the projected 2D Map and hence the 3D map does so too.
Is there a parameter that specifies the maximum allowable depth?
Here is a link to the launchfiles: link
I also tried it with RGBD data provided by stereo_image_proc but got the same results.
Thank you very much for your help.


{kind=link}
Do you have a database to share? (
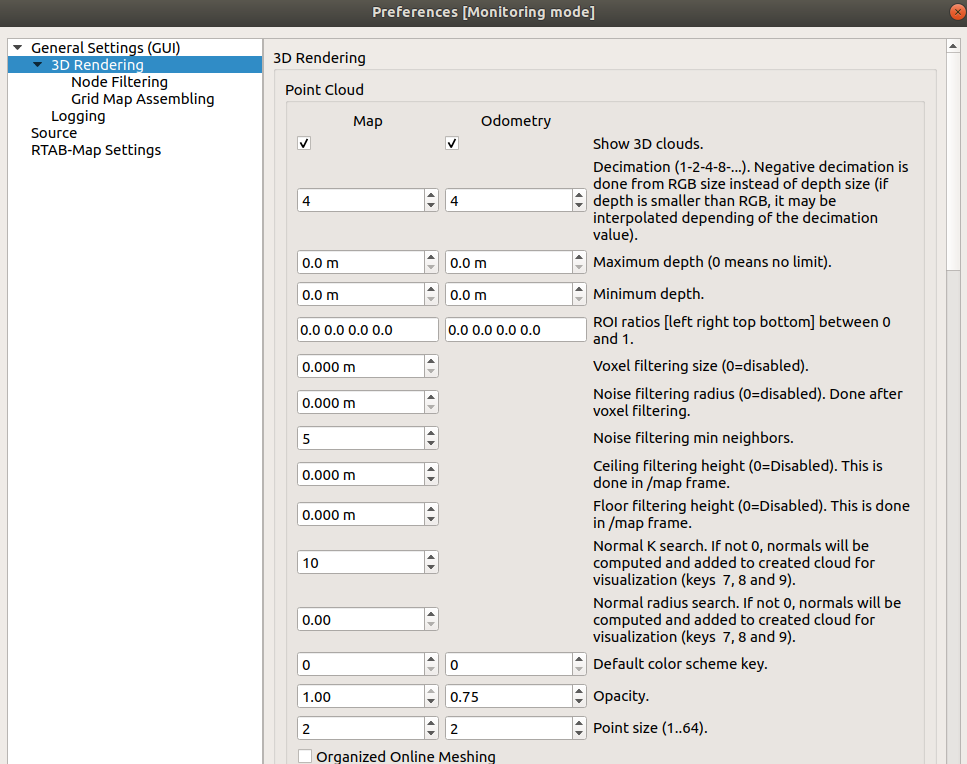
~/.ros/rtabmap.db). In rtabmapviz, is Map column under Preferences->3D Rendering is checked? There are images shown under loop closure detection panel, so mapping seems working, normally a 3D map would be assembled.Thank you for your answer. Map is checked under Preferences->3D Rendering. But the problem seems to be that "Maximum depth" is set to "4" on default although I put
in my launchfile. Is the Maximum depth parameter called different?
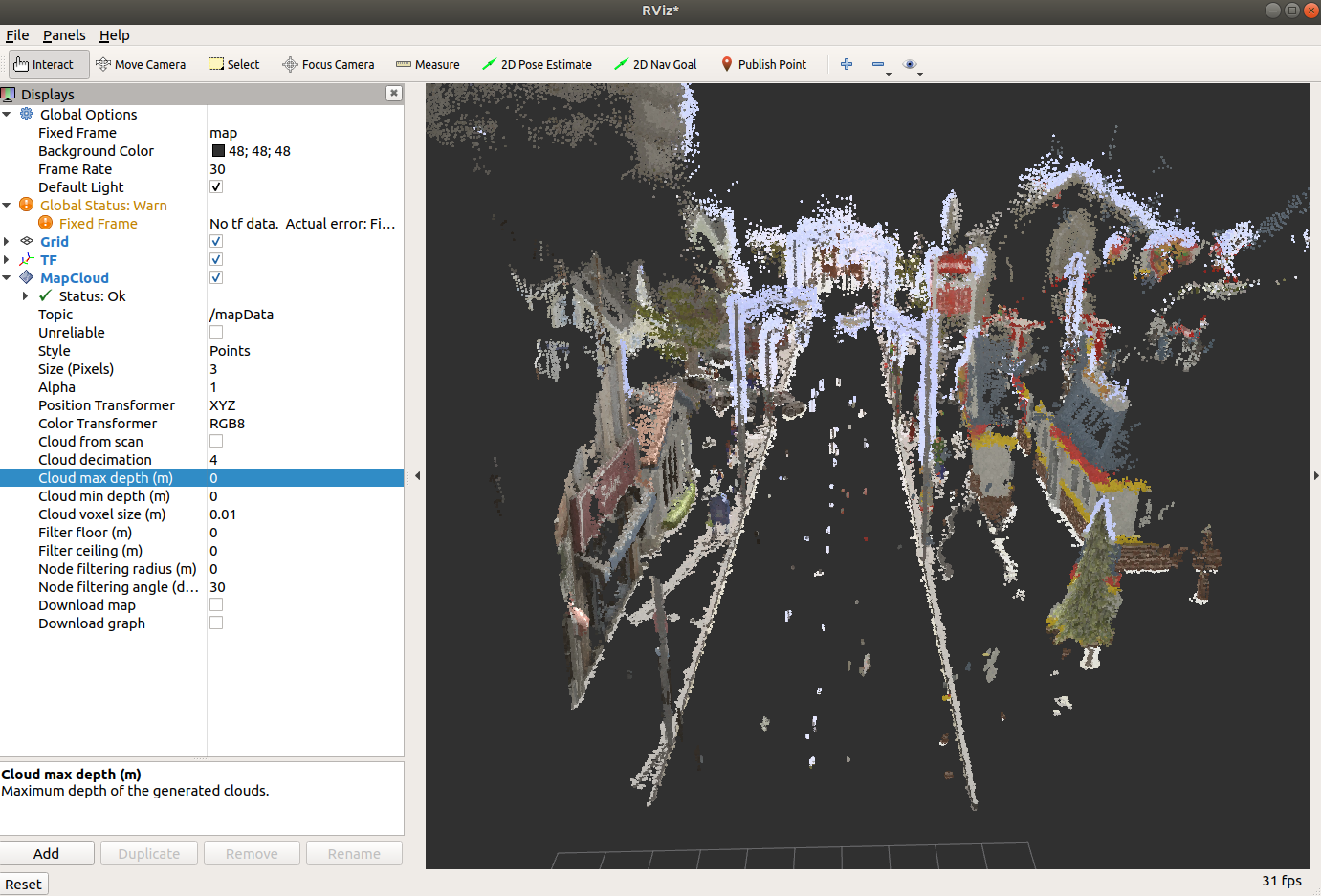
3D rendering parameters in Preferences are related to rtabmapviz only (they don't affect how data are saved in the database, just how they are rendered), not rtabmap.
Kp/MaxDepthandVis/MaxDepthaffect only visual feature extraction, they don't affect how clouds are created in rtabmapviz. It could be easier to debug if you have artabmap.dbto share.Hello. Here is a link to the databse: link . Thank you for your help