
How to correct a texture problem in Gazebo? [closed]

Hello developers!
First, my system Information:
- ROS: Melodic
- Gazebo: 9.0
- Ubuntu: 18.04
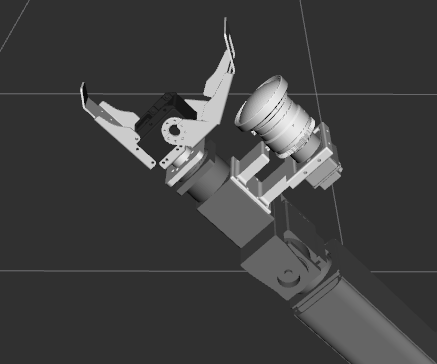
I'm using right now an OpenManipulator-PRO from ROBOTIS and I decided to insert a custom camera and gripper in this arm using a COLLADA type for the meshes.
Bellow you can see in Rviz how it looks like:
But, in gazebo:
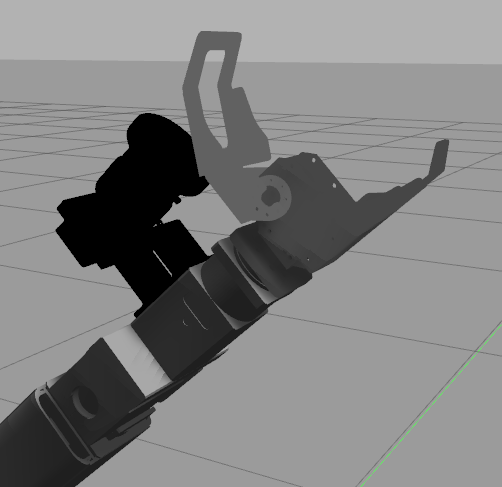
How can I solve this texture problem in gazebo?

You probably want to ask this question in Gazebo answers not here since is an issue related to Gazebo not ROS.
@Weasfas I will do it, thanks!!