
octomap pointcloud accumulation problem
Hello,
I am trying to do mapping () using hokuyo3d lidar. And it works absolutely fine and produce voxels very efficiently.
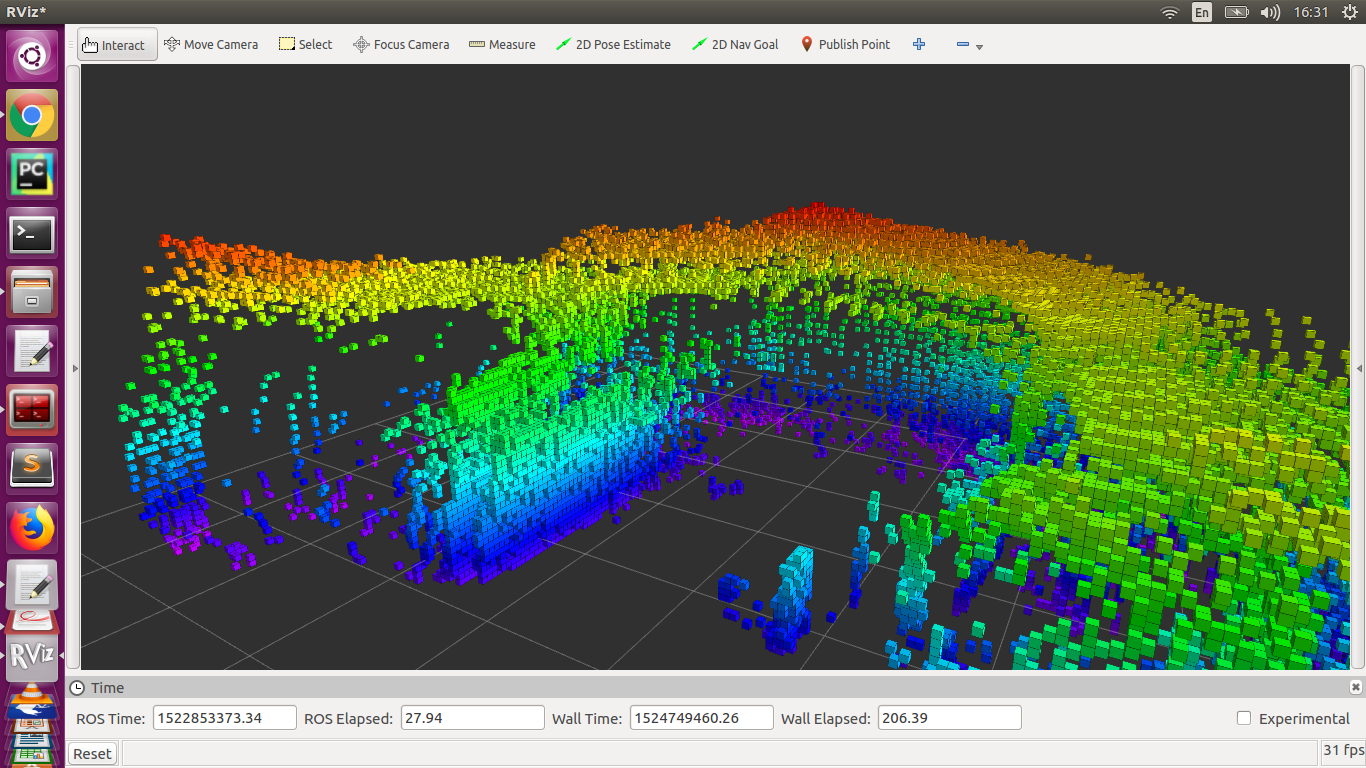
Problem: On moving lidar (transformation and/or rotation) octomap keep populating the map in the same place / . Thus it accumulate everything in the same region, hence creating a mess. (USING IMU TOO)
Thus, it seems that it's not able to find any transformations. Can someone please guide how to make octomap aware of transformations or rotations??
Attached image portrays my problem.
My launch file looks like:
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.05" />
<!-- fixed map frame (set to 'map' if SLAM or localization running!) -->
<param name="frame_id" type="string" value="hokuyo3d_link" />
<!-- maximum range to integrate (speedup!) -->
<param name="sensor_model/max_range" value="5.0" />
<!-- data source to integrate (PointCloud2) -->
<remap from="cloud_in" to="/hokuyo3d/hokuyo_cloud2" />
</node>
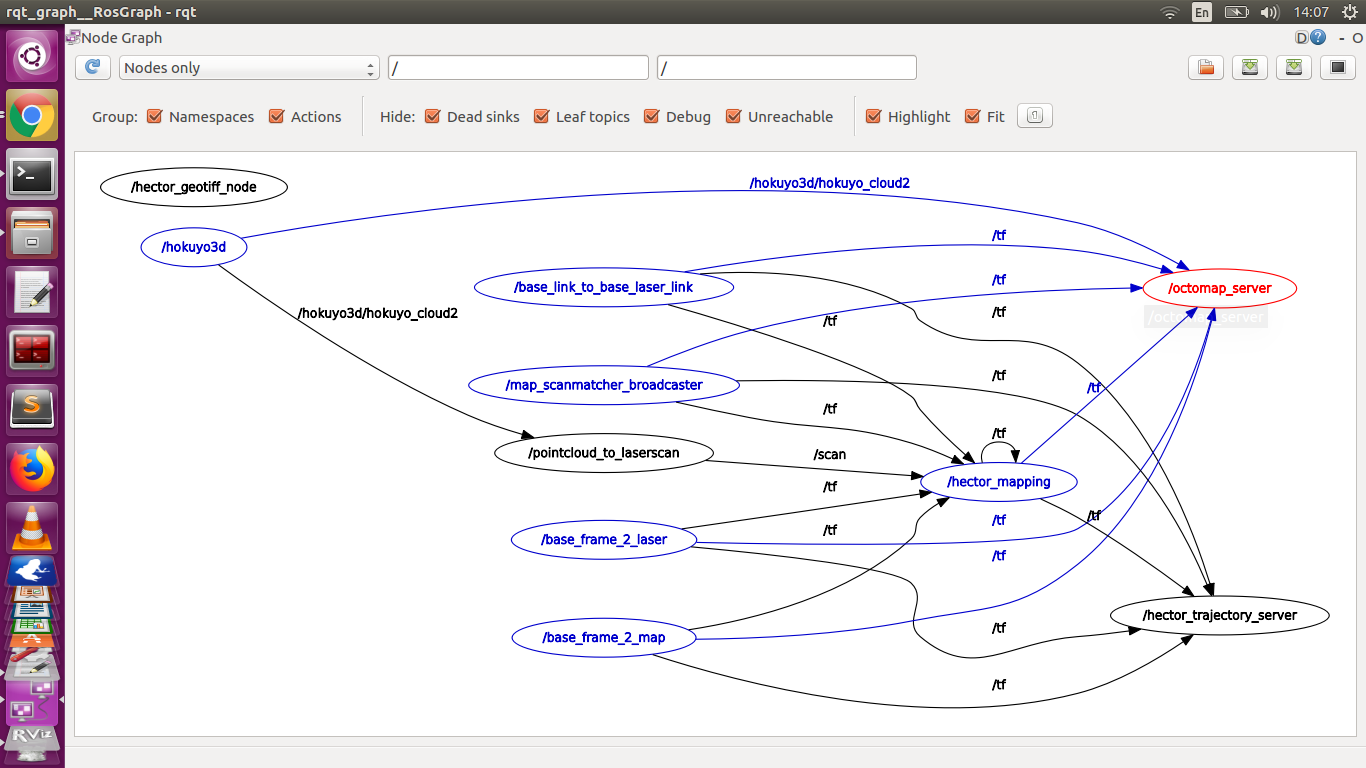
I am using hector slam with octomap to get the project done. But somehow octomap seems something missing to keep track of the trajectory. Here's my tf tree below:
add a comment

