
Reach closer position to goal with obstacle in the middle
Hi everyone,
My problem is the following: I'm working in a project in which a robot has to perform several activities and while navigating it is possible that an object appears in the way. I want it to stop in front of the object and sometimes that happens if the global planner plans. But if the robot can see that the path is blocked from some distance the global planner doesn't even plan, which means that the robot doesn't move at all from a far distance, which is not what I want.
I tried to initialize a fake costmap so that I could plan without the observations of the lasers, but that didn't work out. Tried to configure local and local costmaps.
details:I'm using a front and rear hokuyo for localization and obstacle avoidance, move base, dwa and ros planner.
Any one has any idea how to solve this?
update:
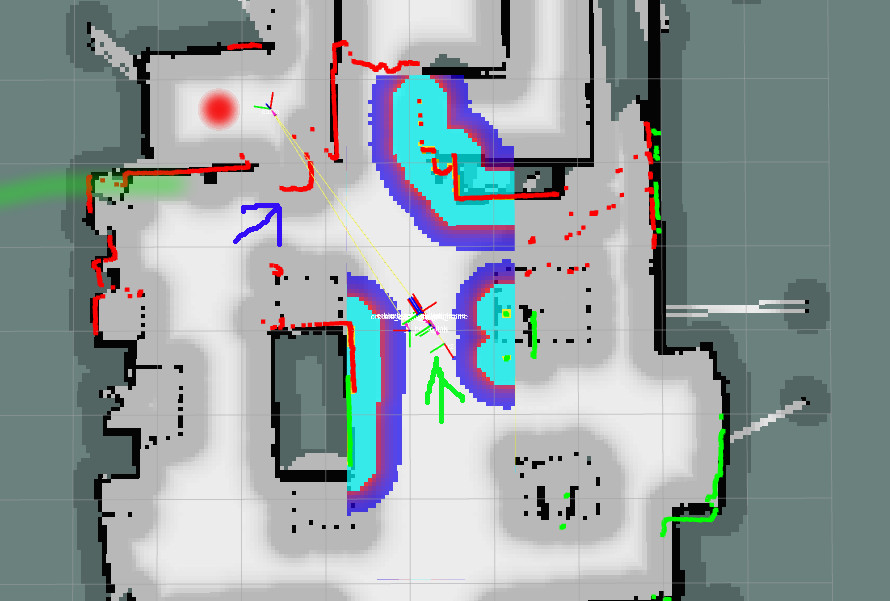 In this image, the red circle is the goal I want to reach, the green arrow is pointing to my robot(bunch of TF's) and the blue arrow is pointing to my non-mapped object. Global costmaps in light grey, local costmaps in colors.
So, in this situation, if I give the goal to the robot it won't even plan because the goal is unreachable. What I want is to get as close to the object as possible. For example, I tried to plan and choose the first reachable position close to the object, but I can't even get a plan to the goal.
In this image, the red circle is the goal I want to reach, the green arrow is pointing to my robot(bunch of TF's) and the blue arrow is pointing to my non-mapped object. Global costmaps in light grey, local costmaps in colors.
So, in this situation, if I give the goal to the robot it won't even plan because the goal is unreachable. What I want is to get as close to the object as possible. For example, I tried to plan and choose the first reachable position close to the object, but I can't even get a plan to the goal.
Thanks in advance.

Can you please add a screenshot of the situation with the local and global costmap displayed?
@Humpelstilzchen, I posted an update on my original post. Thanks for your help!
Obviously it doesn't plan because the whole path is blocked in the global costmap. I have no idea on how to bring the robot closer the to obstacle in this situation. Also the question is: What is a closer position? Is it somewhere below the goal? Above the goal?
What might help is to tune the global costmap to a smaller inflation_radius so the global planner might think that it can reach the goal. But this will probably introduce problems in other situations...
Exaclty. My initial thought was: I'm gonna try to get a plan and go through the plan poses until i get one that is feasible. But that doesn't work, i can't even get a plan. I tried to create a fake costmap, so it could plan through one and execute through another. But I don't think it's possible
You're right @Humpelstilzchen. I don't wan to decrease it to much, might cause some serious crashes
If you only decrease on the global costmap it should not crash into any wall. Crash avoidance is the job of the local costmap
I don't think that solves my problem. What i need is a way to fake plan it