
robot_localization not generating odom to robot's sensor_frame transform
Hello all,
I'm trying to fuse an IMU and a DVL (measures linear velocity on x, y, z). I have the following axis configurations.
- base_link : robot's frame
- base_imu : imu's frame
- base_dvl : DVL's frame
I have a transform broadcaster which broadcasts base_imu->base_link and base_dvl->base_link. The picture attached shows the frame poses. I have set the fixed frame as base_link here (rviz). 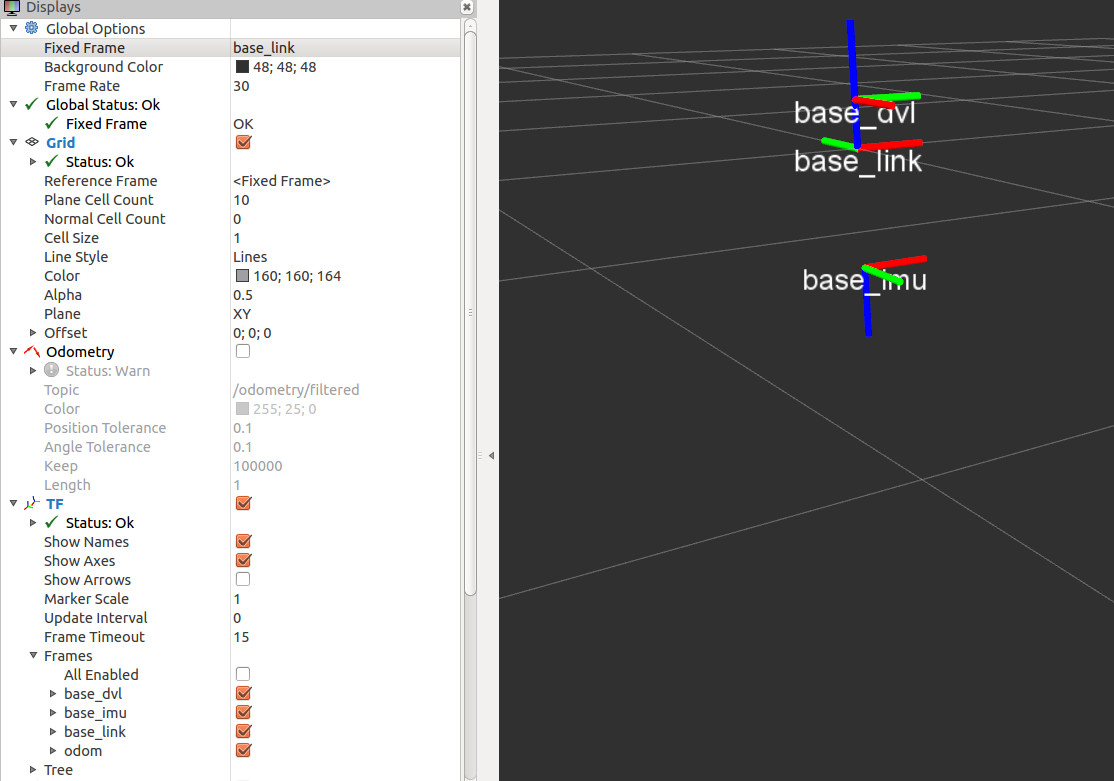
This is the TF tree:
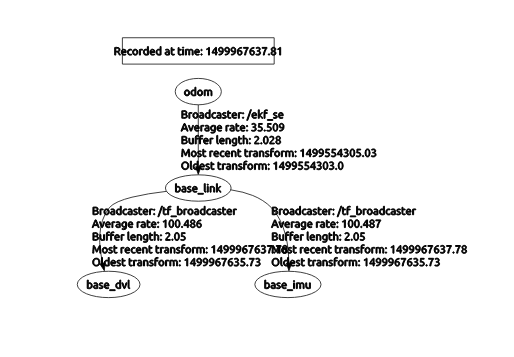
But when I run robot_localization, the localization is perfect but it doesn't show my sensor frames. There are also some warnings generated in rviz (check left pane), saying there isn't any transform to odom frame. But there is a transform as per the tf_tree. Here is a picture:
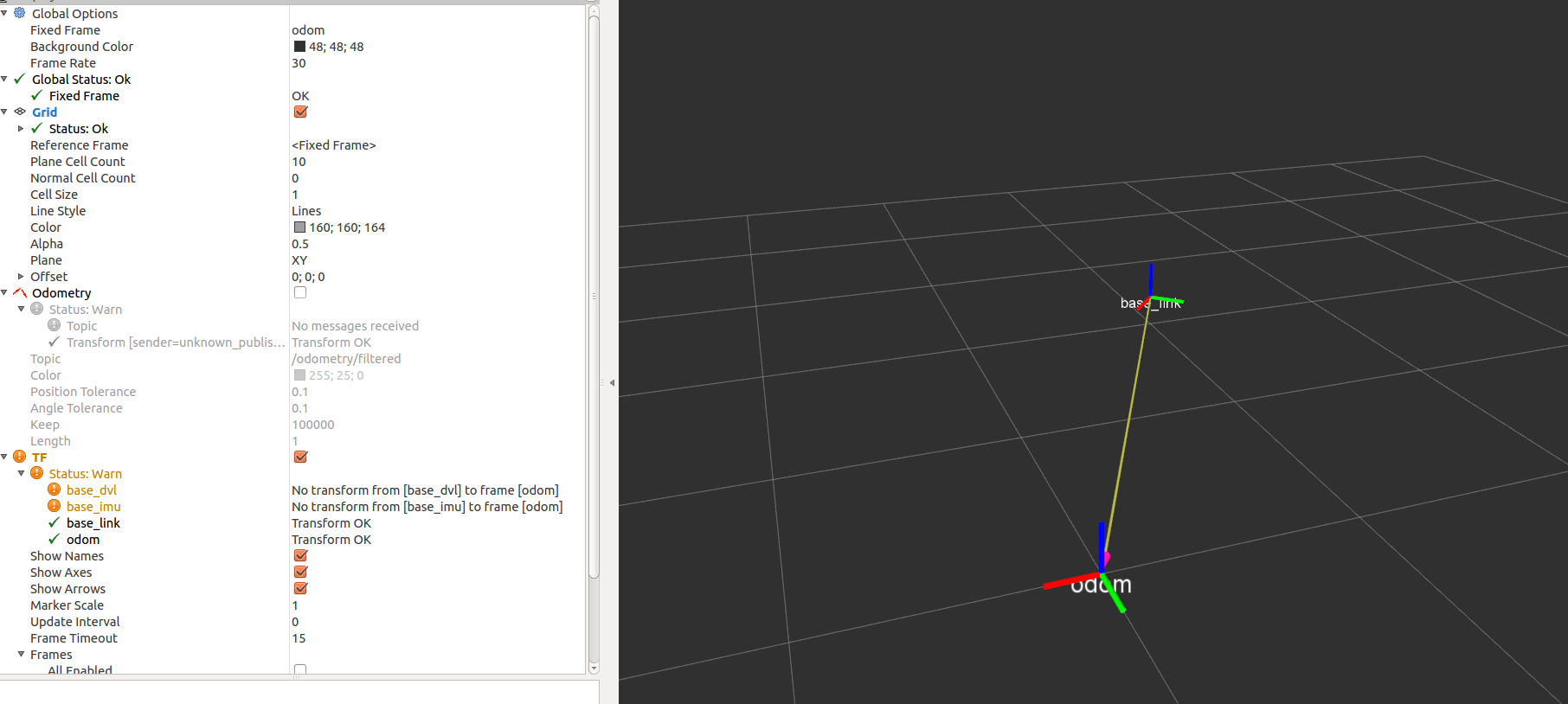
How do I fix this issue?


The timestamp on the different transforms look ways too off for me.They should happen nearly at the same time. Do you run ros across different computers? If so check the current date and time both.
Hi, Thanks for your reply. The timings don't matter to me much since they are just static transforms. But can that be cause for this issue?
The ROS nodes do not know that the transforms do not change. When they are outdated they are ignored.