
How to extract pose/trajectory data from cartographer?
Hello, I am comparing SLAM algorithms based on their poses throughout their trajectory in my thesis and I can't come up with a way to get a trajectory from cartographer. I use .bag data with ground truth from MIT Stata center (link below). Currently I'm obtaining trajectory via hector trajectory server and it worked fine with both Hector SLAM and gMapping but Cartographers trajectory is quite off
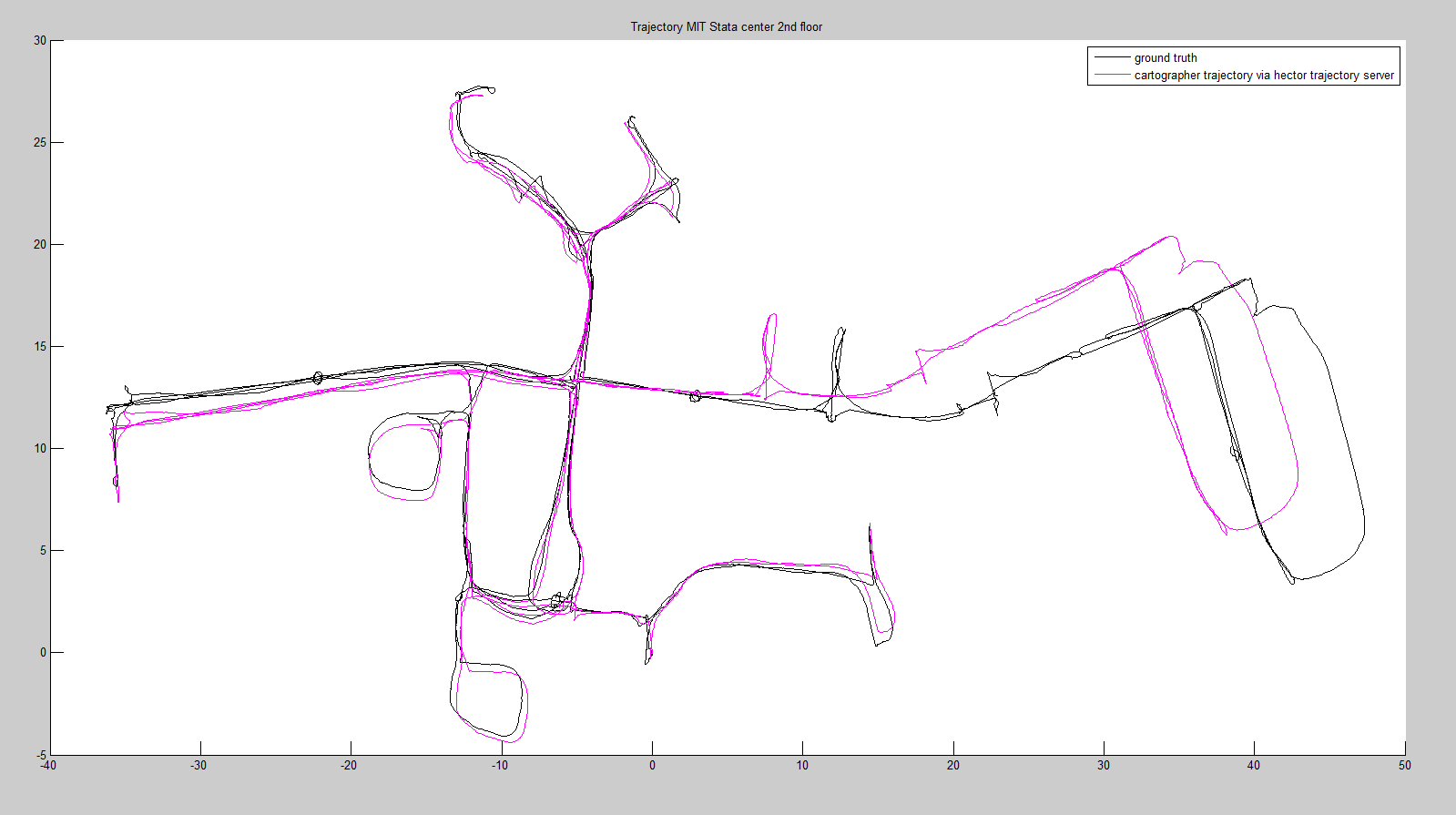
This is from run at 0.2 speed. When I run it at realtime and robot is coming back from that part "north" to the main long hall (that part that looks like two curved horns) back that long hall to go "east" it simply skips like this
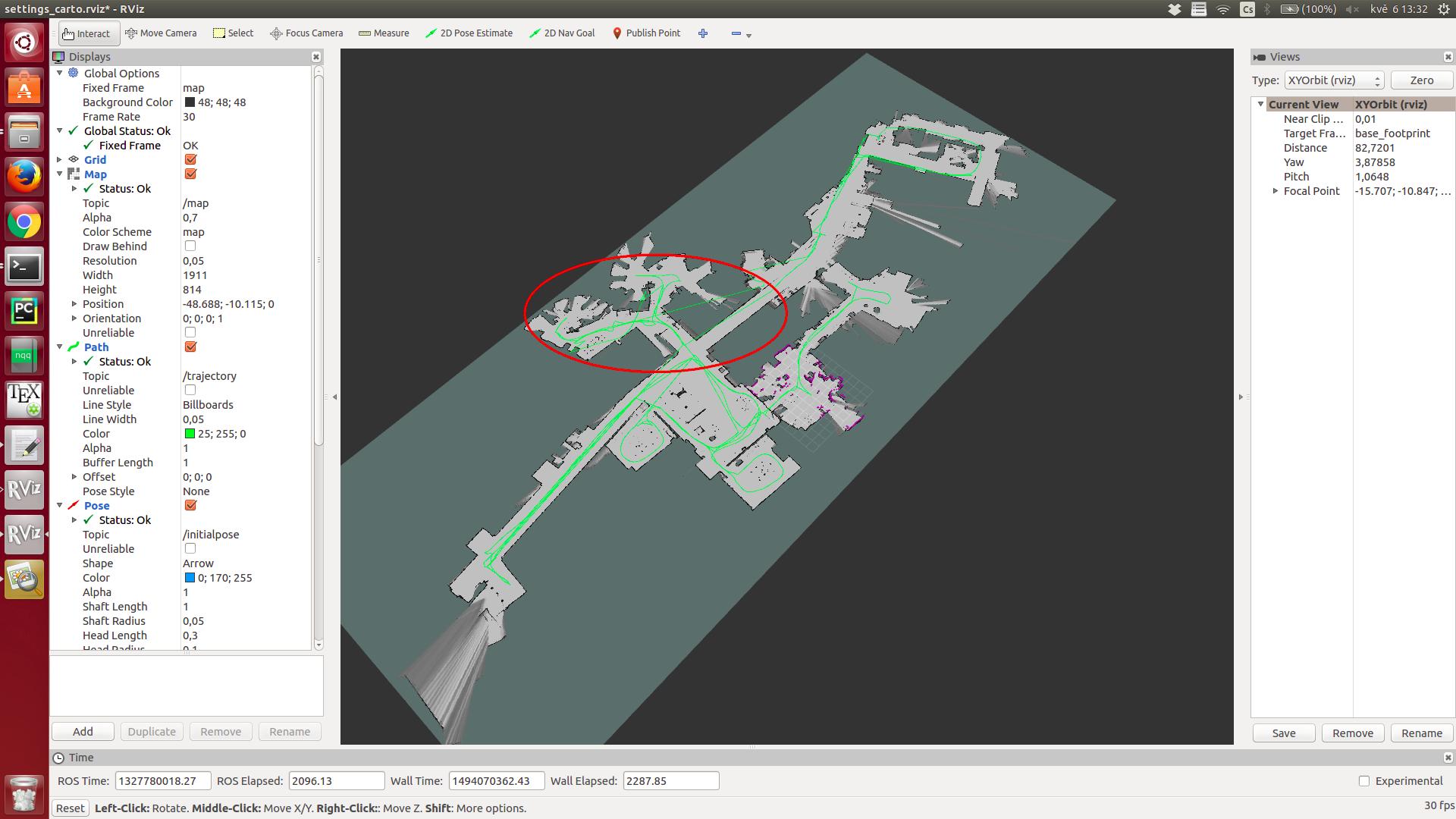
I believe there is some wild computing when cartographer is closing the loop from that "north" part which is not compatible with hector trajectory server. I also hope that I have right settings for cartographer because map on the outcome is correct.
source code: http://ge.tt/9exBp2k2
used bag: 2012-01-28-11-12-01.bag.noimages (in ground truth) at http://projects.csail.mit.edu/stata/d...
Thanks for any feedback in advance.
cartographer.launch
<launch>
<node pkg="rosbag" type="play" name="player" output="screen" args="--clock --pause --rate=1 /home/struncp/ros_workspace/test/SLAM_test_MIT_stata_center/2012-01-28-11-12-01.bag"/>
<param name="/use_sim_time" value="true"/>
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory /home/struncp/ros_workspace/test/SLAM_test_MIT_stata_center/cartographer_config
-configuration_basename config.lua"
output="screen">
<remap from="scan" to="/base_scan" />
</node>
<node pkg="hector_trajectory_server" type="hector_trajectory_server" name="hector_trajectory_server" output="screen">
<param name="target_frame_name" type="string" value="/map" />
<param name="source_frame_name" type="string" value="/base_link" />
<param name="trajectory_update_rate" type="double" value="4" />
<param name="trajectory_publish_rate" type="double" value="0.25" />
</node>
<node pkg="rviz" type="rviz" name="rviz"
args="-d /home/struncp/ros_workspace/test/SLAM_test_MIT_stata_center/settings_carto.rviz" />
</launch>
config.lua
include "map_builder.lua"
options = {
map_builder = MAP_BUILDER,
map_frame = "map",
tracking_frame = "base_footprint",
published_frame = "base_footprint",
odom_frame = "odom_combined",
provide_odom_frame = true,
use_odometry = false,
use_laser_scan = true,
use_multi_echo_laser_scan = false,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.15
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.angular_search_window = math.rad(35.)
SPARSE_POSE_GRAPH.optimization_problem.huber_scale = 1e2
return options
trajectory_builder_2d.lua
TRAJECTORY_BUILDER_2D = {
use_imu_data = true,
laser_min_range = 0.,
laser_max_range = 30.,
laser_min_z = -0.8,
laser_max_z = 2.,
laser_missing_echo_ray_length = 5.,
laser_voxel_filter_size = 0.025,
use_online_correlative_scan_matching = true,
adaptive_voxel_filter = {
max_length = 0.5,
min_num_points = 200,
max_range = 50.,
},
real_time_correlative_scan_matcher = {
linear_search_window = 0.1,
angular_search_window = math.rad(20.),
translation_delta_cost_weight = 1e-1,
rotation_delta_cost_weight = 1e-1,
},
ceres_scan_matcher = {
occupied_space_weight = 1e1,
translation_weight = 1e1,
rotation_weight = 1e2,
covariance_scale = 1e-2,
ceres_solver_options = {
use_nonmonotonic_steps = false,
max_num_iterations = 20,
num_threads = 1,
},
},
motion_filter = {
max_time_seconds = 5.,
max_distance_meters = 0.2,
max_angle_radians = math.rad(1.),
},
imu_gravity_time_constant = 10.,
num_odometry_states = 1000,
submaps = {
resolution = 0.05,
half_length = 200.,
num_laser_fans = 90,
output_debug_images = false,
laser_fan_inserter = {
insert_free_space = true,
hit_probability = 0.55,
miss_probability = 0.49,
},
},
}
sparse_pose_graph.lua
SPARSE_POSE_GRAPH = {
optimize_every_n_scans = 90,
constraint_builder = {
sampling_ratio = 0.3,
max_constraint_distance = 15.,
adaptive_voxel_filter = {
max_length = 0.9,
min_num_points = 100,
max_range = 50.,
},
min_score = 0.55,
global_localization_min_score = 0.6,
lower_covariance_eigenvalue_bound = 1e-11,
log_matches = true,
fast_correlative_scan_matcher = {
linear_search_window = 7.,
angular_search_window = math.rad(30.),
branch_and_bound_depth = 7,
},
ceres_scan_matcher = {
occupied_space_weight = 20.,
translation_weight = 10.,
rotation_weight = 1.,
covariance_scale = 1e-4,
ceres_solver_options = {
use_nonmonotonic_steps = true,
max_num_iterations = 10 ...
Could I ask you to please attach all images to your question? I've given you enough karma to do so. Also: it would be nice if you could include your code in your question too: just use the Preformatted Text button for that. If it's too much, then consider using Github. Dropbox does not work ..
.. very well for these things, as it completely depends on you maintaining your account and not deleting the files.
About images: when I use the provided tag"alt text(/path/img.jpg "title")" (with ! and []) I can't see the image and I don't have any restricted characters in the path. Strange.
Anyway looks like the drift is caused by not using imu in the algorithm.
You should be able to attach the images directly to your post. Just use the image button and browse for your image.
Hi! can I ask you how you have plotted the ground truth vs the hector_trajectory output? Excuse me if this is unrelated to your original question. Thanks
I extracted timestamps, positions and bearings from each implementation to .csv format and plotted them via matlab
what do you mean by bearing?
angle of orientation of the robot