
MoveIt! Issues with Shuffling Walking of a Robot
Hello ROS and MoveIt! community,
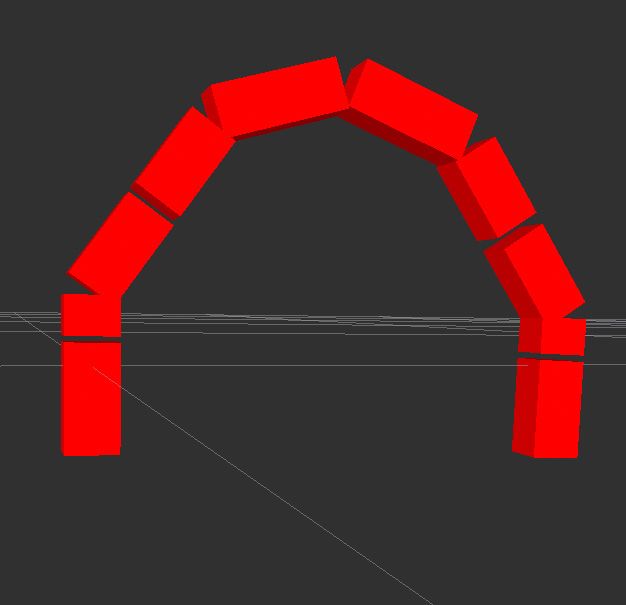
I am trying to model a 10-link robot with the first and last link both being feet, shown below (collision elements).
Edit: cannot upload image yet, so link is here.
This robot should be able to walk by the following:
- Link1 (foot1) and link10 (foot2) will both be in contact with the ground, with the other links in between (link2-9) will be in a U-bend (as shown in the image).
- Link1 (foot1) will lift off the ground and move toward link10 (foot2).
- Link10 (foot2) will lift off ground and move away from link1 (foot2).
- Repeat steps 2-3 for continuous walking.
I have created the URDF and moveit_config files for the robot, but in doing so I have come across problems when using MoveIt! for trajectory planning of steps 2-3:
- The URDF branches outward from link1 -> link10, so planning can be done for link10. When I want to move link1 (foot1) off the ground and toward link10 (foot2), how does this work? Do I need two URDFs, one from link1 -> link10 and the other backwards from link10 -> link1?
- I do not want a fixed constraint in the URDF or SRDF constraining the feet (link1 and link10) to the world frame, but I would like the foot (link1) to stay fixed to the ground if the other foot (Link10) is taking a step, and vice versa.
Any help would be appreciated, thanks!

{kind=link}
Update: I was able to remove the attached to world link and replace it in the SRDF with a planar virtual joint. However, this did not fix planning for link1 since MoveIt! does not recognize this as an end effector link (which I assumed). Is there a way to load 2 URDF's and switch between them?