
MoveIT cannot take robot initial state but can control the robot (Panda)
Hi,
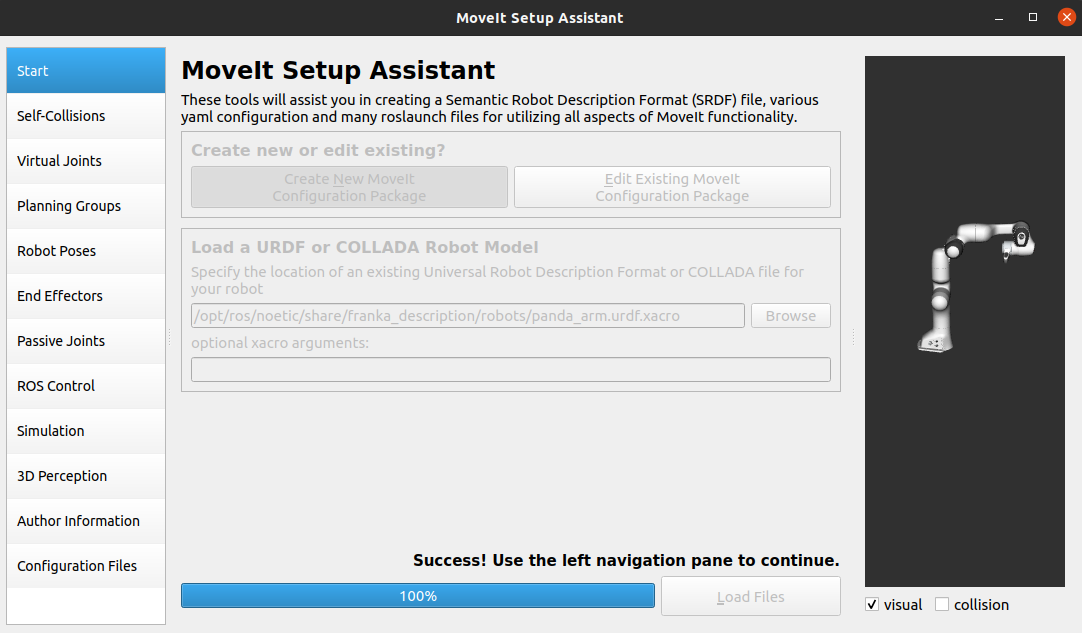
I have disabled the franka_hw and controllers and added position_controllers/JointTrajectoryController using gazebo_ros_control/DefaultRobotHWSim sim type in gazebo plugin. I can now successfully control the robot with follow joint trajectory. Plus, I created a MoveIT config package, set the controllers and I am able to connect the gazebo model successfully.
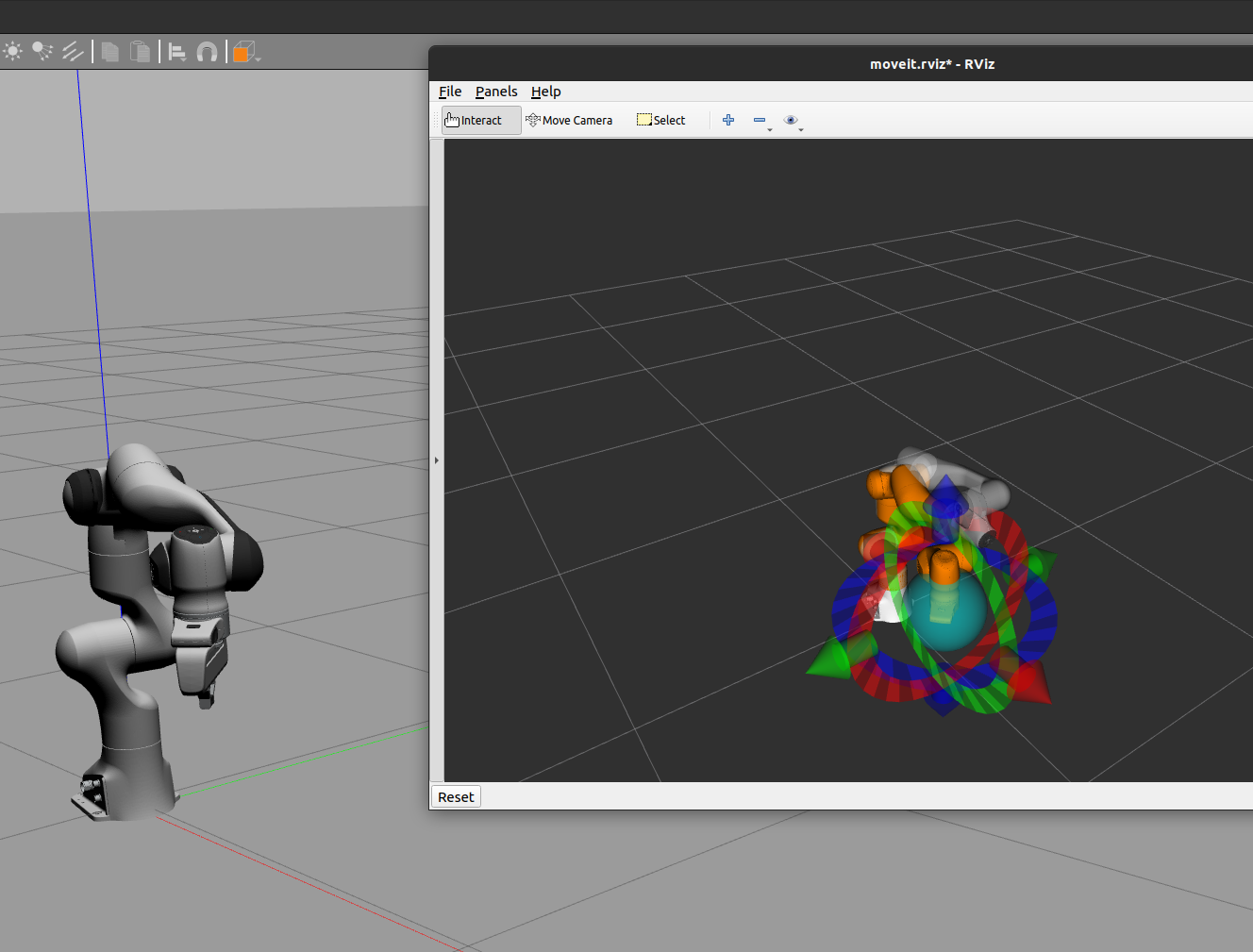
The strange part is that the robot cannot get the initial robot state even though it can control it. As you see, the gazebo model gripper is downwards but the MoveIT Rviz is bent.
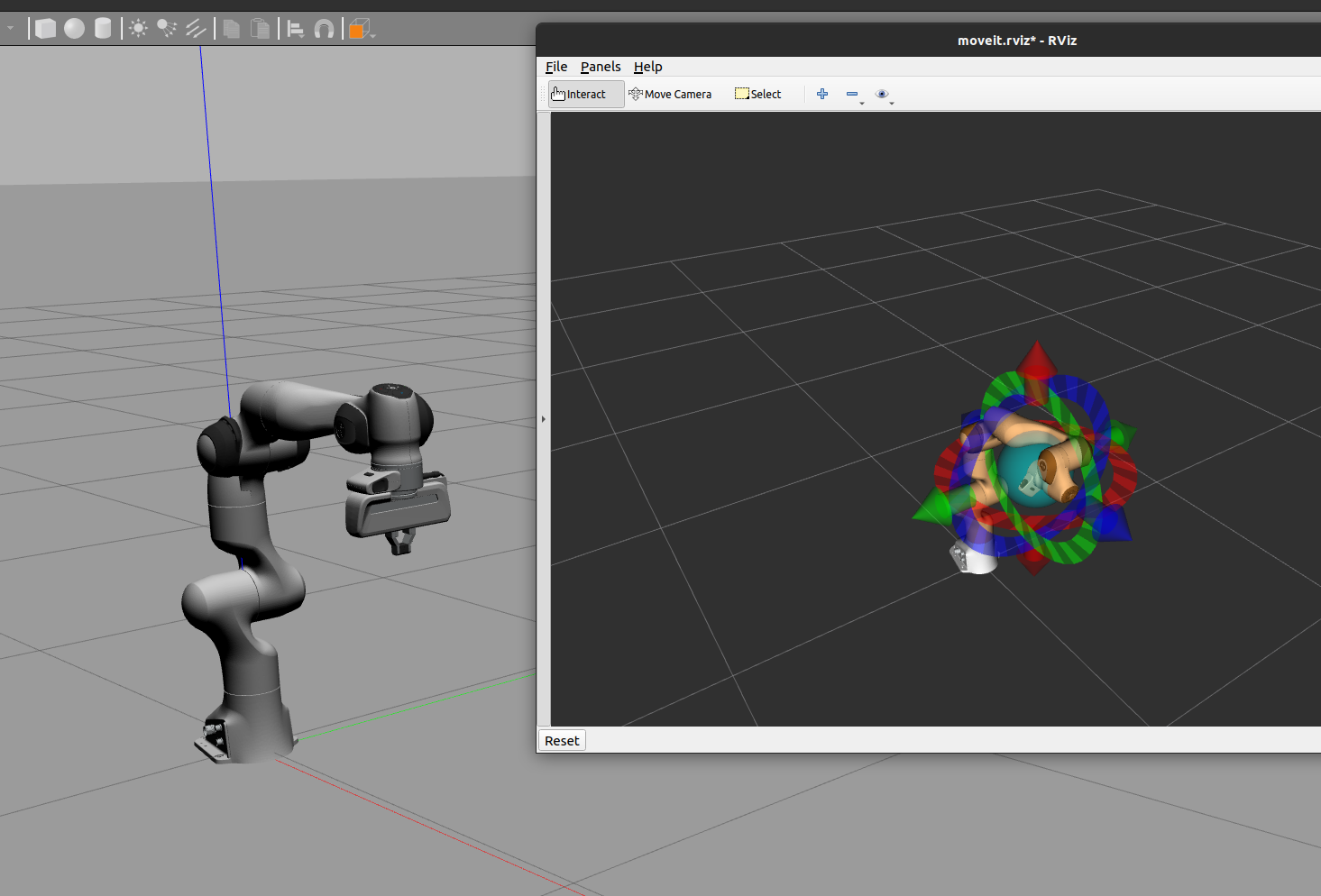
However, I can make send a goal pose and the robot can successfully go here:
It is not such a big deal in working progress but I want it to run perfectly. Any idea why MoveIT does not take robot state from Gazebo?
Can someone help me?

MoveIt gets its state from the
/joint_statestopic, so I would look carefully at thejoint_state_controllerwhich should be publishing that topic. And thejoint_state_controllershould be running with Gazebo. Sorry I can't help much more than that.