
Is it possible to use robot_localization for multiple robots?
Hello all,
I'm working on a small, multi-robot simulation using Husky robots. I've been using the base husky_simulator with some modifications to allow for multiple robots. The way I've accomplished this is through the use of namespaces. I call each "spawn_husky.launch" file in a separate namespace, which sets up all the plugins and publishes unique topics for each robot.
Everything seems to be working fine except for the the topics husky1/odometry/filtered and husky2/odometry/filtered. So I dug through the launch files and found that this topic is published in the control.launch file which uses a "robot_localization" node of the "ekf_localization_node" type.
The tf frame tree of a single robot simulation (without namespaces) looks like this:
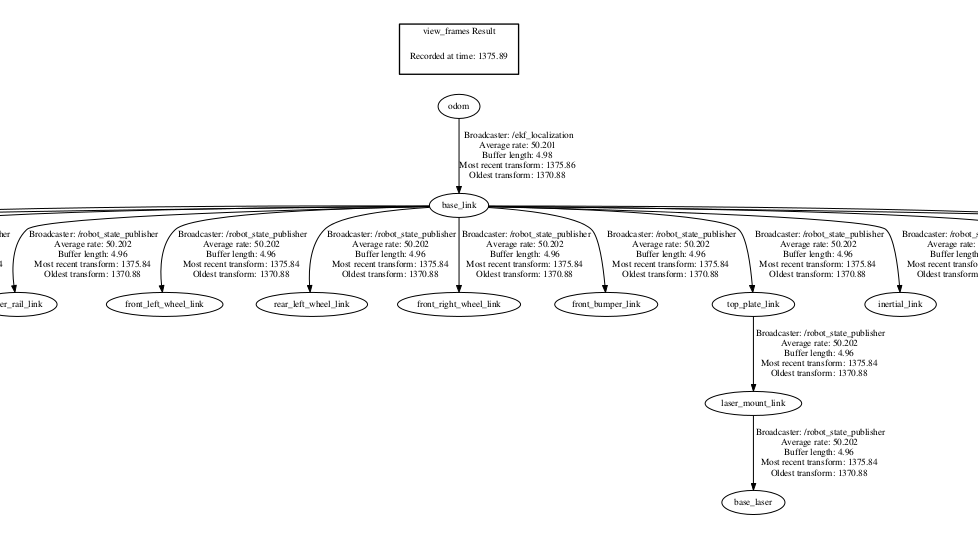
But when launched from within the namespace, with multiple robots, looks like this:
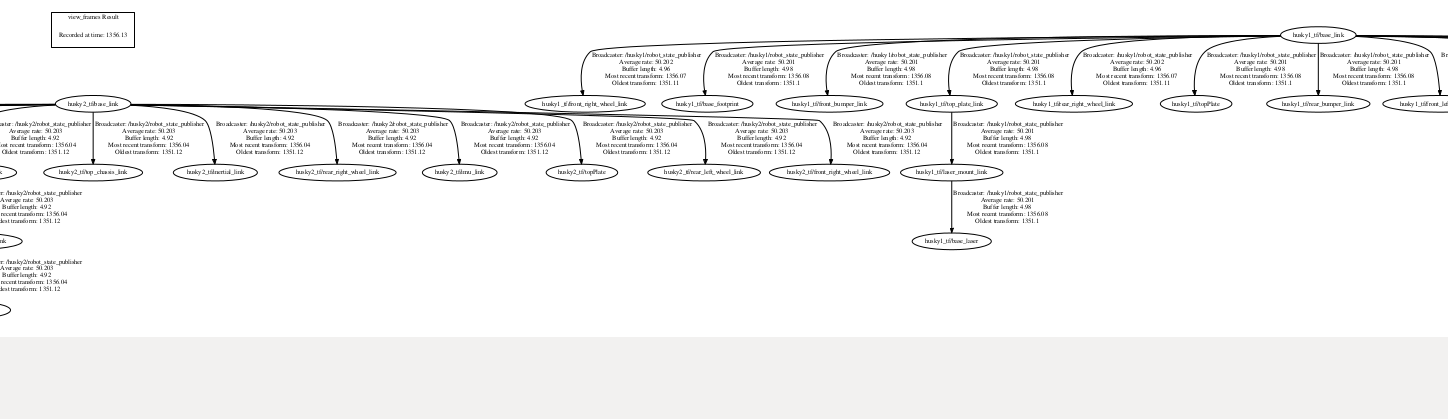
I know it's hard to see, but the "odom" frame no longer exists, so this seems the localization is not working properly. My initial guess is that the robot_localization limits the parameters to "map" or "odom" but since I'm using a namespace and tf_prefix, it becomes "husky1/odom" and this is not allowed. But does anyone have any ideas as to how I might be able to correct this or why it might be happening?
Edit 1: Some additional information, as requested by Tom.
Here are the frame_ids during a single robot simulation with no namespace or tf_prefix
RESULTS: for all Frames
Frames:
Frame: base_footprint published by unknown_publisher Average Delay: -0.000202703 Max Delay: 0
Frame: base_laser published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: base_link published by unknown_publisher Average Delay: -6.75676e-05 Max Delay: 0
Frame: front_bumper_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: front_left_wheel_link published by unknown_publisher Average Delay: 0 Max Delay: 0
Frame: front_right_wheel_link published by unknown_publisher Average Delay: 0 Max Delay: 0
Frame: imu_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: inertial_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: laser_mount_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: rear_bumper_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: rear_left_wheel_link published by unknown_publisher Average Delay: 0 Max Delay: 0
Frame: rear_right_wheel_link published by unknown_publisher Average Delay: 0 Max Delay: 0
Frame: topPlate published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: top_chassis_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: top_plate_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
Frame: user_rail_link published by unknown_publisher Average Delay: -0.000135135 Max Delay: 0
All Broadcasters:
Node: unknown_publisher 150.338 Hz, Average Delay: -6.94586e-05 Max Delay: 0
And here are all the frame_ids shown by tf_monitor when running the multi robot simulation:
RESULTS: for all Frames
Frames:
Frame: husky1/base_footprint published by unknown_publisher Average Delay: 0.0182353 Max Delay: 0.04
Frame: husky1/base_laser published by unknown_publisher Average Delay: 0.0182353 Max Delay: 0.04
Frame: husky1/front_bumper_link published by unknown_publisher Average Delay: 0 ...

 I think I have the same problem with nbeyers.
sample input message:
I think I have the same problem with nbeyers.
sample input message:
Can you post sample messages for each input? I want to see the
frame_ids. Also, even though I know what's in it, can you post the .yaml settings forekf_localization_node? You can leave out the covariance matrices.I just updated the post to include the frames and .yaml file. Let me know if anything else might be useful. Thanks!
Can you post a sample input message for each input topic?
What do you mean by input topics? Are you referring to the topics used by the ekf_localization_node such as husky1/imu/data or husky2/husky_velocity_controller/odom?
Yes. I need to see sample messages so I can verify frame_ids in the messages themselves.