Odometry isn't reasonable for rotational motion

The thing is; following screenshot is from simulation, on Gazebo. (And Real robot does this too.) ekf_localization_node uses both of imu and odometry. And using only odometry causes this problem too.
I'm following this guide to tune my robot : ROS Wiki Navigation Tuning Guide I've set Decay Time to 30 and started inplace rotation.
Here is Rviz screenshot:
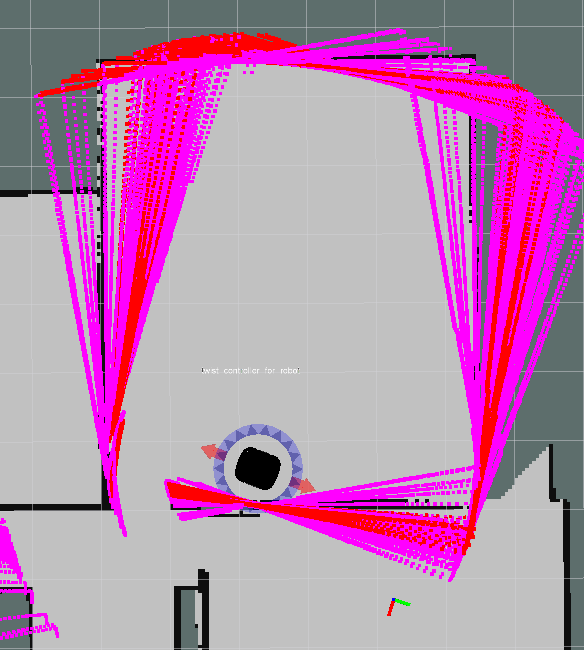
Odometry isn't reasonable for rotational motion.
Robot's translational motion is good and reasonable. But the rotational motion is bad for localization. What can I do for correcting odometry data? Or Are there any new issues on ekf_localization?
Thank you.
add a comment