
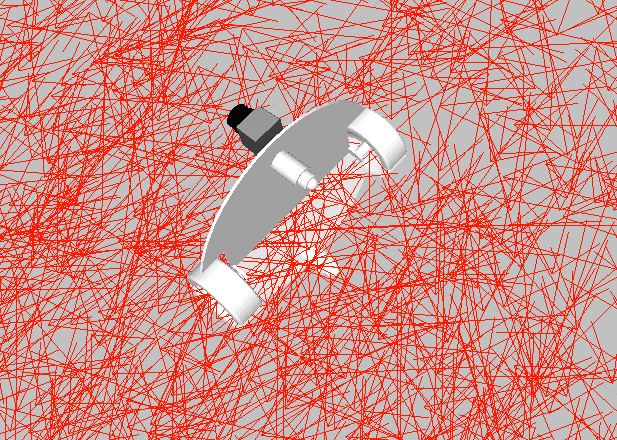
Robot model orientation is improper with respect to map frame.
Robot model is not properly oriented (upside down) in rviz when "map" is selected as fixed frame. When the fixed frame is odom the robot model was perfectly aligned and oriented in rviz. How to bring the robot to same position as it was in odom frame.
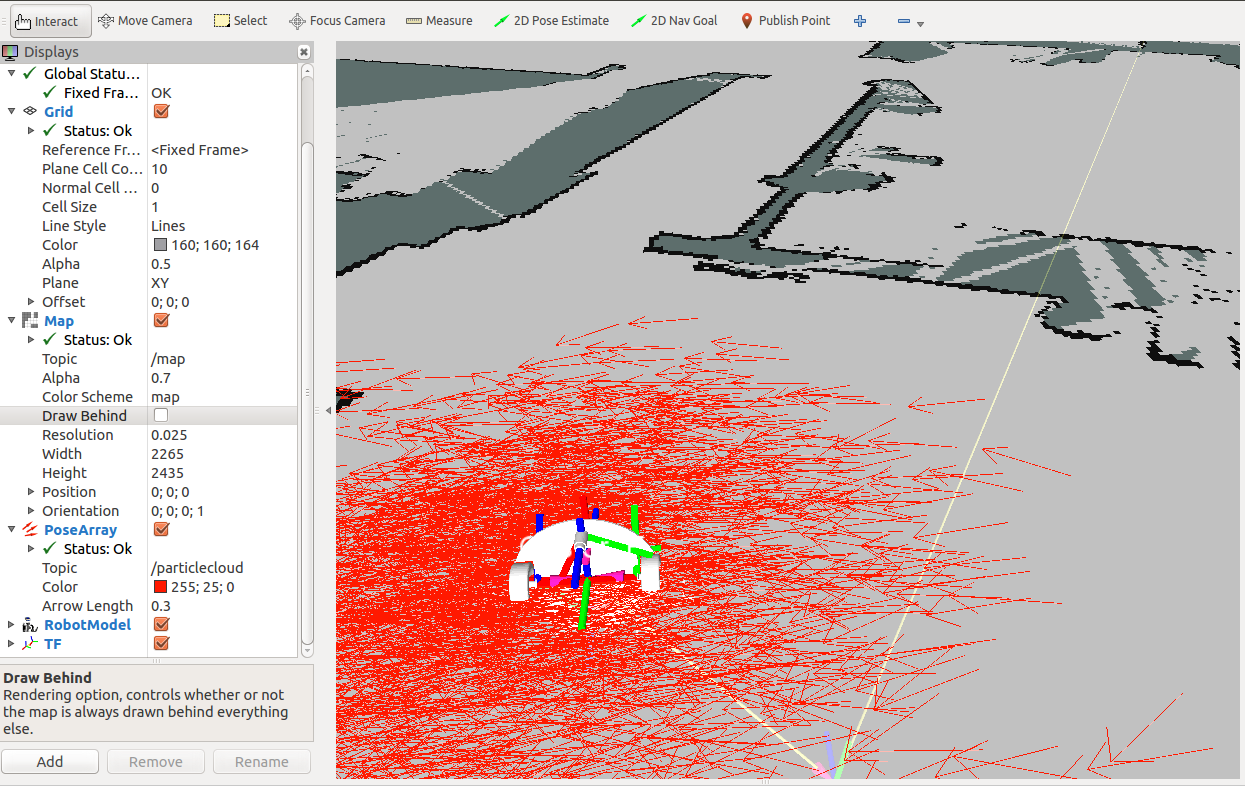
Refer the result below
add a comment
