Odd "pulsed" acceleration when using amcl and move_base [closed]
Hello,
I am trying out amcl and move_base on a new home built robot that is similar to the TurtleBot but uses the Serializer microcontroller and Pololu motors and encoders. I also have a Hokuyo laser scanner.
I'm running the odometry loop at 20Hz and the robot can do dead reckoning fairly nicely. Next I created a small map of a couple of rooms using gmapping and that also looks good.
The trouble occurs when I then run amcl and move_base and set a navigation goal in RViz. The robot always gets to the goal fine and follows the planned path fairly well. However, as it is moving it does a kind of pulsed acceleration and deceleration, even when it is moving across a complete clear space. The frequency of the pulsing is about 2 seconds. Is this something that could be tweaked somewhere in the base local planner parameters? I am basically using the TurtleBot parameters for the planner and the cost maps so I won't post them here.
Thanks!
patrick
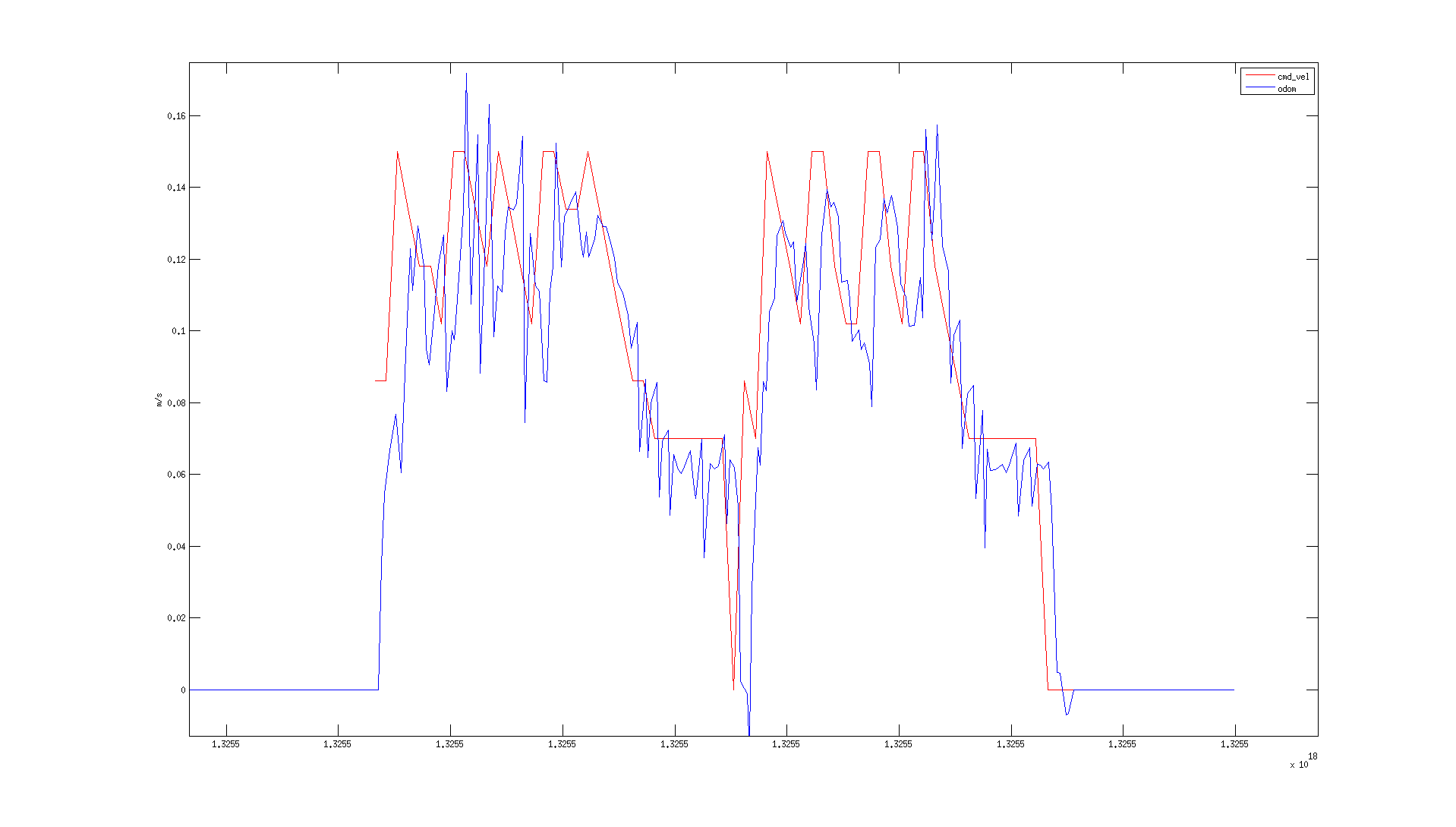
UPDATE: Jan 1, 2012: It seems I spoke too soon. I am still getting oscillations in cmd_vel as sent to the robot by move_base. I have posted a bag file here demonstrating the phenomenon. I am running move_base with a blank map and fake localization. Then I set a nav_goal about a meter ahead and slightly to the right of the robot in an otherwise clear area. If you rxplot cmd_vel you can see the oscillations in the x component which are very noticeable when watching the robot. For move_base, I am using essentially the identical parameters as in the turtlebot_navigation package.
Can anyone see the cause of this oscillation--perhaps some kind of asynchronization between /odom and /cmd_vel?
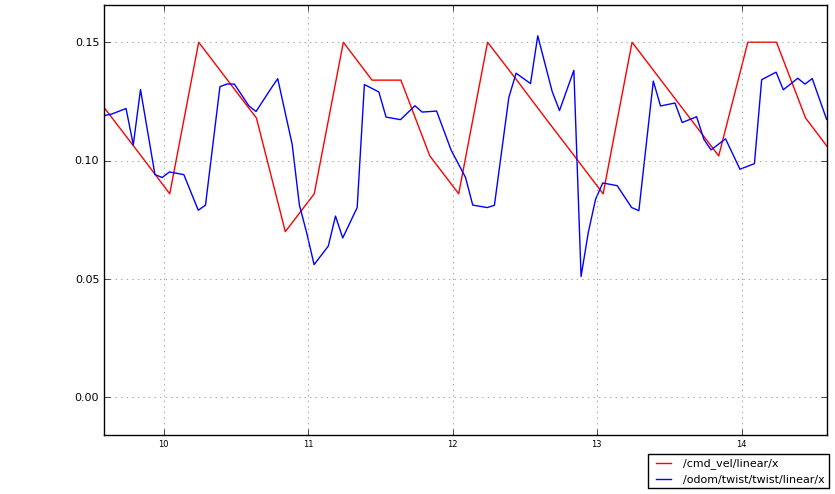
Update 2: Here is an rxplot of /cmd_vel/linear/x and /odom/twist/twist/linear/x with the robot up on blocks so the wheels are spinning with no resistance: