
urdf in rviz is too deep
Hi, I setup my robot system and its working good.
I am using hector mapping with urdf and a laserscanner and I am getting the following result:
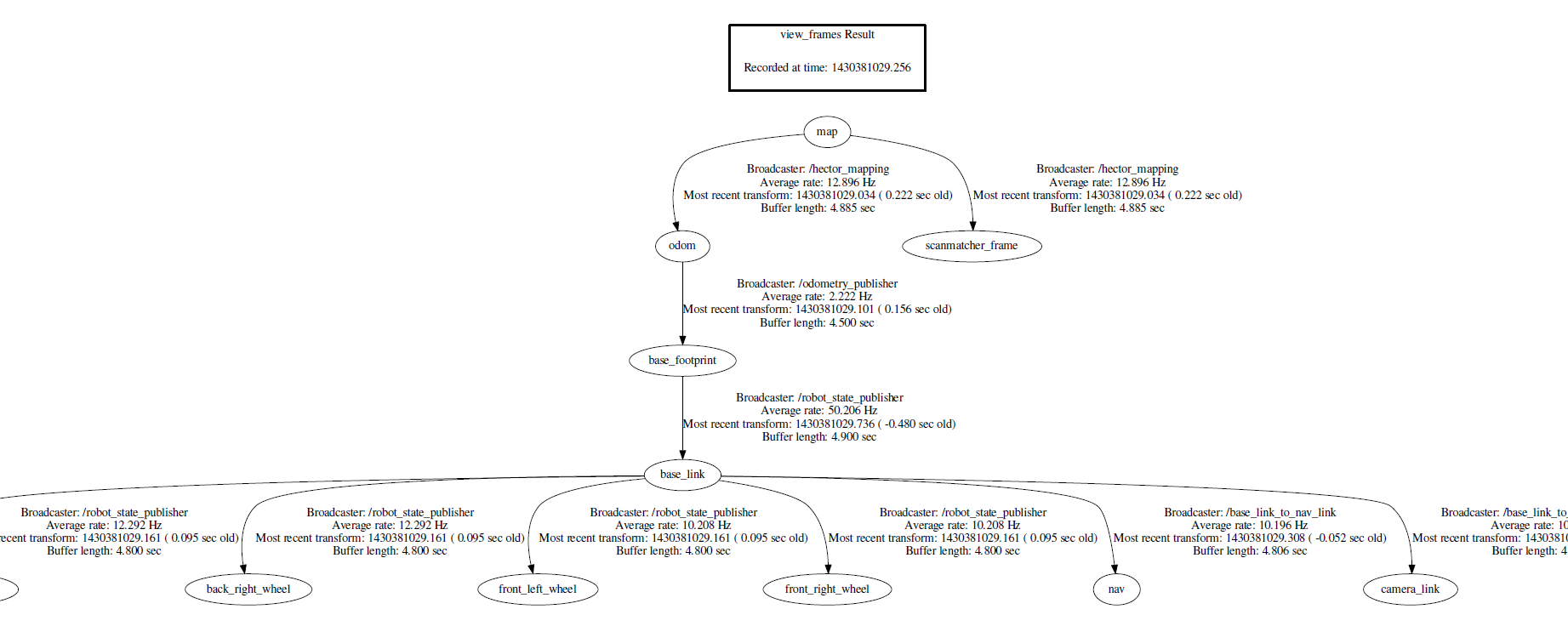
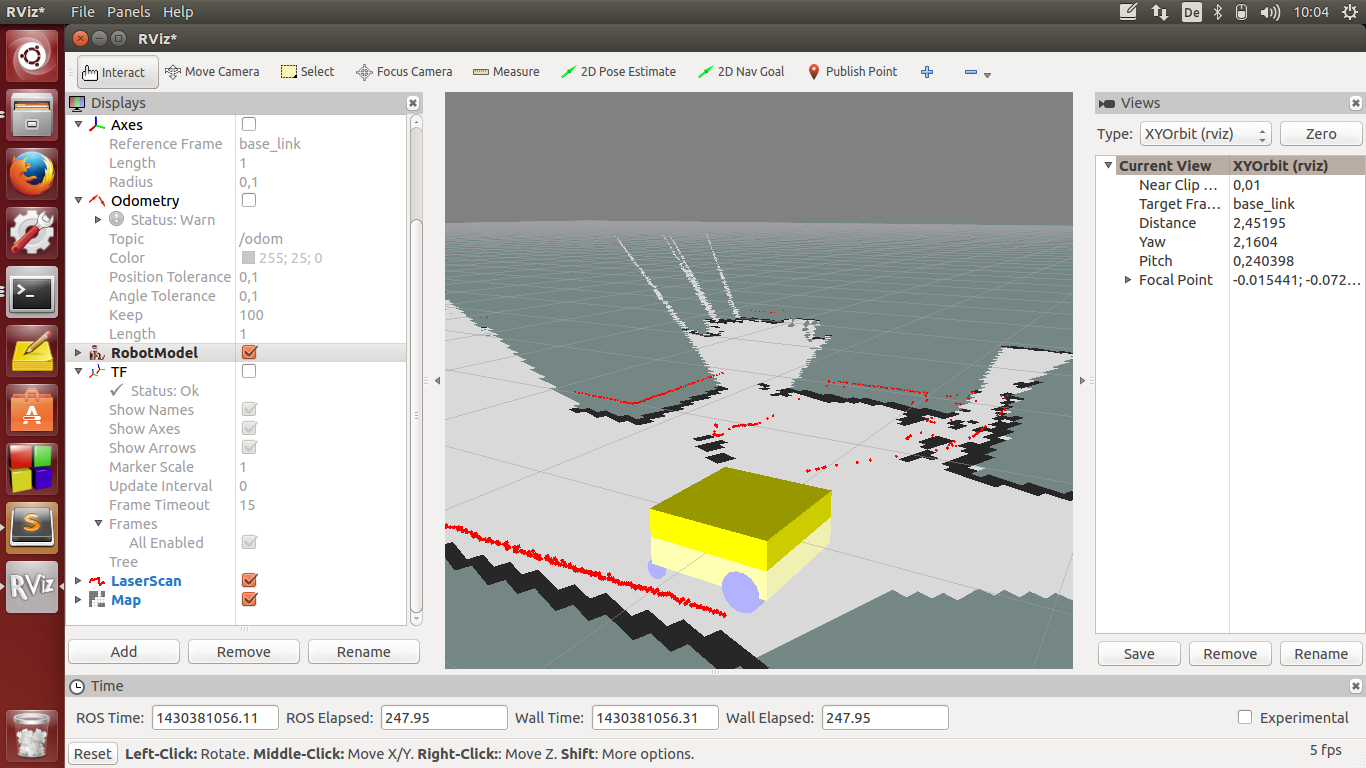 I dont know why exactly the robot is kind of swimming in the world, here is my tf tree:
I dont know why exactly the robot is kind of swimming in the world, here is my tf tree:
Another Question is now, how can I make the Robot move autonomously and how can I integrate a path planner? What is a common used module to make the robot move and avoid obstacles and crashes?
thanks in advance, felix

For your second question, you'll want to check out the navigation stack. It has packages that include local and global path planning, and it is the most common way to get started with autonomous navigation in ROS.