
Tf origin is away from the base_link
I have built my differential drive mobile robot in solidworks and converted that to URDF file using soliworks2urdf convertor. I successfully launched and robot and simulated with tele-operation node. Since i am intended to use navigation stack in i viewed the transform of the robot in rviz which resulted as below.
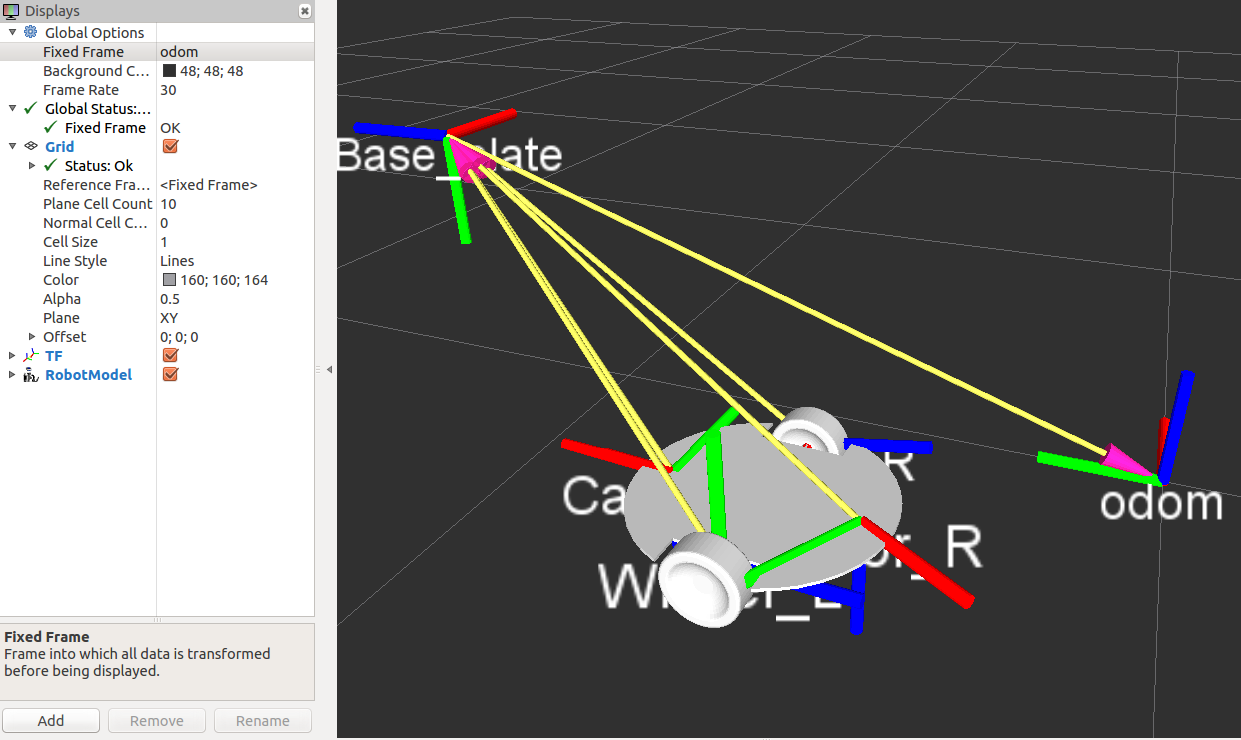
As you can see the base plate is the one which supports the wheels and castors but the tf of base plate is shown away from the actual link and even odom is away from the model. Where have i gone wrong and how to fix this. Refer the URDF of model below.
<?xml version="1.0"?>
<robot
name="JMbot">
<link
name="Base_plate">
<inertial>
<origin
xyz="-0.3317 0.71959 -0.39019"
rpy="0 0 0" />
<mass
value="0.55378" />
<inertia
ixx="0.0061249"
ixy="0.00016086"
ixz="-8.6651E-18"
iyy="0.0041631"
iyz="-1.4656E-17"
izz="0.010283" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://jmbot_description/meshes/Base_plate.STL" />
</geometry>
<material
name="">
<color
rgba="0.74902 0.74902 0.74902 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://jmbot_description/meshes/Base_plate.STL" />
</geometry>
</collision>
</link>
<link
name="Wheel_R">
<inertial>
<origin
xyz="0.010951 1.1102E-16 -1.1102E-16"
rpy="0 0 0" />
<mass
value="0.45064" />
<inertia
ixx="0.00091608"
ixy="-1.2355E-19"
ixz="1.0715E-18"
iyy="0.00053395"
iyz="-6.7763E-20"
izz="0.00053395" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://jmbot_description/meshes/Wheel_R.STL" />
</geometry>
<material
name="">
<color
rgba="0.74902 0.74902 0.74902 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://jmbot_description/meshes/Wheel_R.STL" />
</geometry>
</collision>
</link>
<joint
name="Wheel_R"
type="continuous">
<origin
xyz="-0.14688 0.40756 -0.73464"
rpy="-2.7127 -0.081268 -3.1416" />
<parent
link="Base_plate" />
<child
link="Wheel_R" />
<axis
xyz="1 0 0" />
</joint>
<link
name="Wheel_L">
<inertial>
<origin
xyz="-0.039049 2.2204E-16 2.498E-15"
rpy="0 0 0" />
<mass
value="0.45064" />
<inertia
ixx="0.00091608"
ixy="-9.6693E-19"
ixz="-1.7816E-18"
iyy="0.00053395"
iyz="1.3553E-19"
izz="0.00053395" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://jmbot_description/meshes/Wheel_L.STL" />
</geometry>
<material
name="">
<color
rgba="0.74902 0.74902 0.74902 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://jmbot_description/meshes/Wheel_L.STL" />
</geometry>
</collision>
</link>
<joint
name="Wheel_L"
type="continuous">
<origin
xyz="-0.46668 0.40756 -0.70859"
rpy="2.512 0.081268 3.4272E-15" />
<parent
link="Base_plate" />
<child
link="Wheel_L" />
<axis
xyz="-1 0 0" />
</joint>
<link
name="Castor_F">
<inertial>
<origin
xyz="2.2204E-16 0 0.031164"
rpy="0 0 0" />
<mass
value="0.056555" />
<inertia
ixx="2.4476E-05"
ixy="-2.8588E-35"
ixz="1.0281E-20"
iyy="2.4476E-05"
iyz="-1.2617E-20"
izz="7.4341E-06" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy ...add a comment
