
displaying point cloud in rviz from .bag files, error
I am trying to read .bag files, display the point cloud data in rviz.
rosbag play -l refined_point_clouds.bag
[ INFO] [1313454488.757094980]: Opening refined_point_clouds.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1284056763.769318 Duration: 1.105802 / 4.917923
But I got the following error,
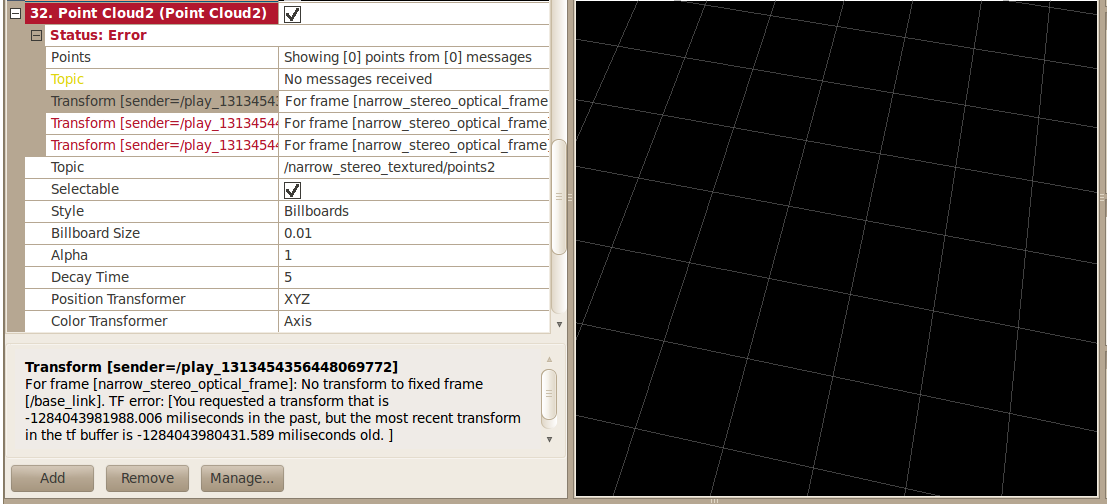
saying that
For frame [narrow_stereo_optical_frame]: No transform to fixed frame [/base_link]. TF error: [You requested a transform that is -1284043982668.005 miliseconds in the past, but the most recent transform in the tf buffer is -1284043980431.589 miliseconds old. ]
The coordinate frame in rviz was set as
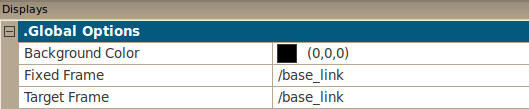
The point cloud would appear correctly if i changed the fixed frame to /narrow_stereo_optical_frame.
The error seems related with the tf conversion time longer than the buffer can take.Confused... Could someone explain it to me? How can I avoid this problem, 'cuz I always stuck in this kind of problem... Thanks~
add a comment
