
use data from LASER:can not make a map in rviz
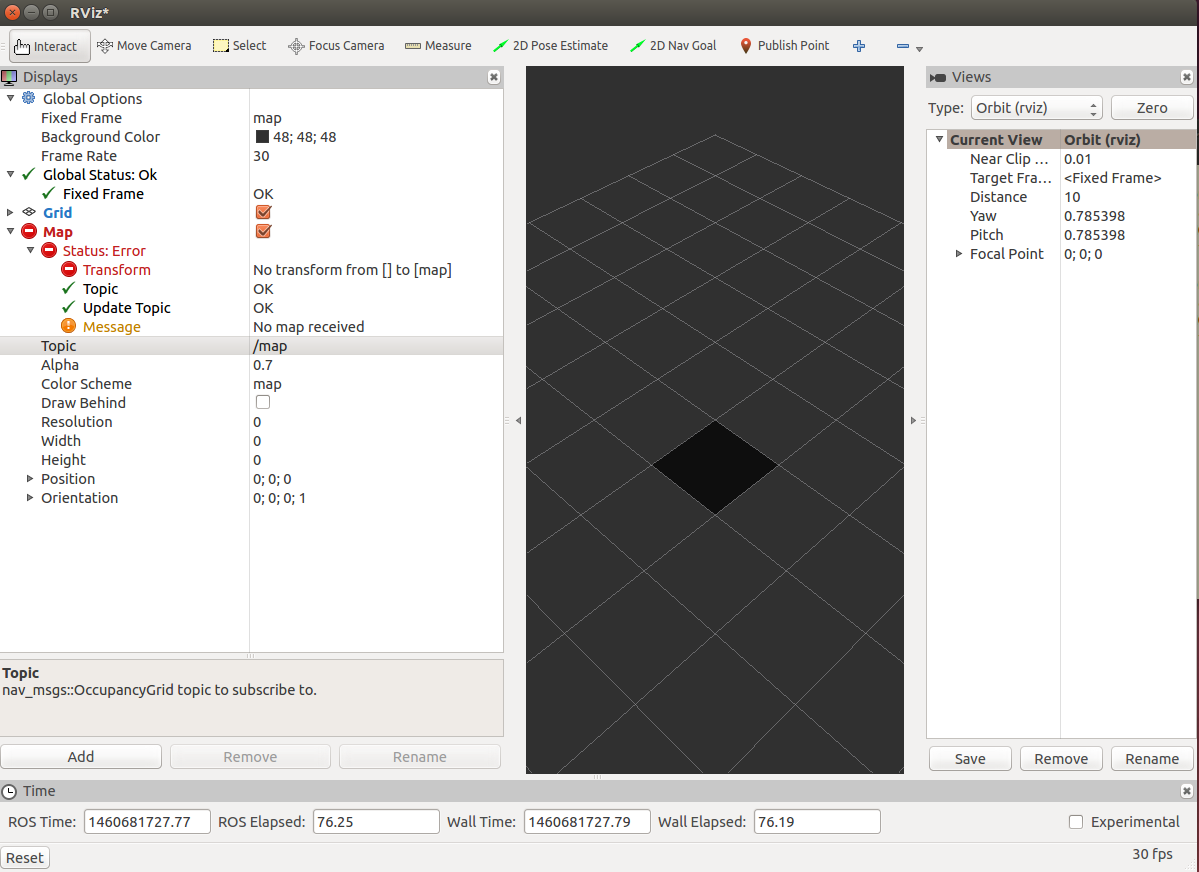
hello , i buy a sick_tim561 which is a laser. when i download the sick_tim package from viki, i change the ip in the package and success to connet the sensors. i have used "rostopic echo " to make sure that the /scan and /tf output datas. but i don't kown the datas is correct or not. when i use the gmapping package to subscribe to the topic /scan ,i use rviz to add /map into the map in rviz. but it shows error like this !
roslaunch sick_tim sick_tim551_2050001.launch
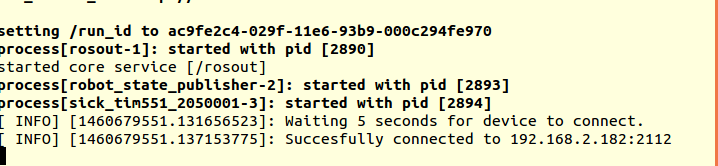 rosrun gmapping slam_gmapping scan:=base_scan
rosrun rviz rviz
image description
rosrun gmapping slam_gmapping scan:=base_scan
rosrun rviz rviz
image description 
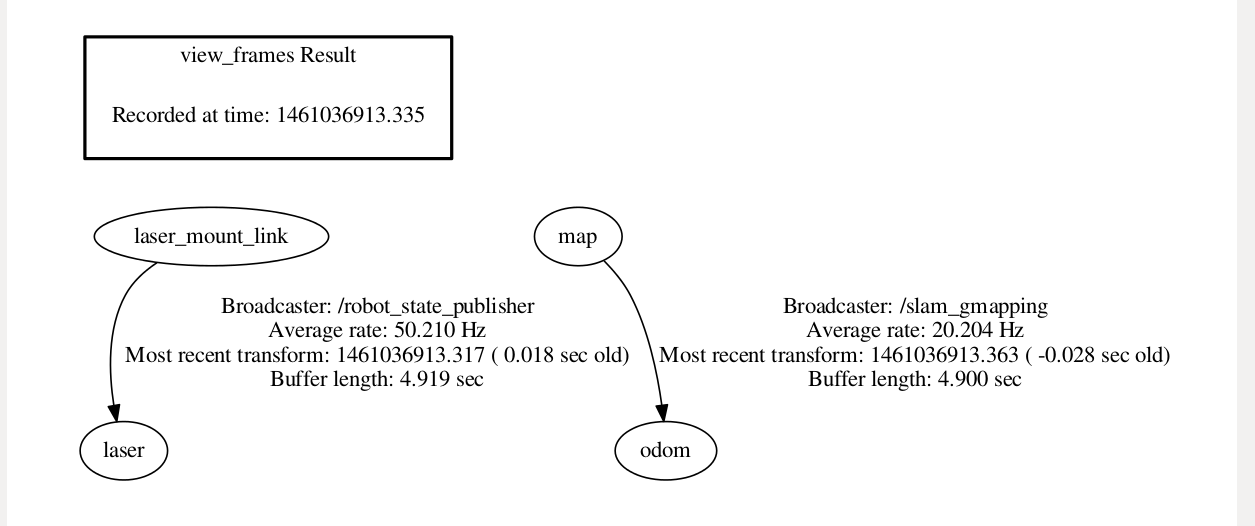
rosrun tf view_frames
show:
do you have any idea about the error?thanks a lot


{kind=link}
It looks like you don't have your transforms set up correctly, so gmapping doesn't know where your laser is mounted on your robot. Have you set up a URDF or static transforms? Do you have a robot with wheels and wheel odometry?