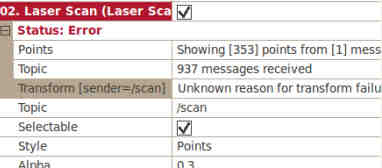
Rviz tf error: unknown reason for transform failure

Hello everybody! My OS: Ubuntu 10.04
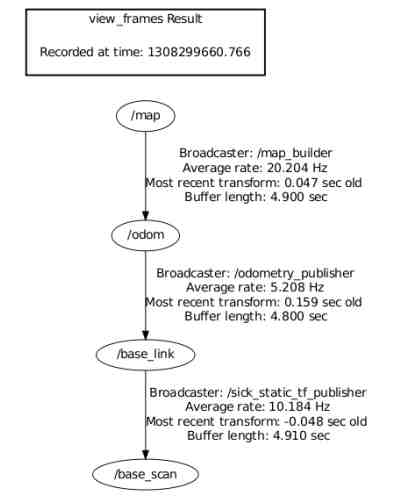
My TF configure: /map -> /odom -> /base_link -> /base_scan.

While the TF seems not problem, there is still an fatal error at RVIZ. RVIZ show an error about laser scan: unknown reason for transform failure. I'm confuse, so I need your help. I'm appreciate for any hints.
add a comment