
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-18 15:36:30 -0500 | received badge | ● Famous Question (source) |
| 2019-12-13 04:30:13 -0500 | received badge | ● Famous Question (source) |
| 2019-02-18 19:26:05 -0500 | received badge | ● Famous Question (source) |
| 2018-09-19 04:25:38 -0500 | marked best answer | A Robot should stop moving If cmd_vel is stopped Publishing or If STOP command send. Hello
I have one confusion |
| 2018-09-13 06:39:03 -0500 | received badge | ● Famous Question (source) |
| 2018-09-13 06:39:03 -0500 | received badge | ● Notable Question (source) |
| 2018-07-25 14:10:36 -0500 | marked best answer | Navigation stack should use which node map_server or map_saver In navigation stack I am using a launch file. In that launch file map_server package is launching map_server node. For creating map I am using gmapping package. In Gmapping I am using map_saver node from map_server package to save a map. I am in confusion that in Navigation stack which node of map_server package I should use map_server or map_saver. What is the difference between map_server and map_saver? |
| 2018-02-12 07:57:56 -0500 | received badge | ● Famous Question (source) |
| 2017-12-08 02:28:55 -0500 | marked best answer | Can Gmapping package in ROS can create map at Runtime We have gmapping package in ROS Can we create a map in ROS at runtime using gmapping package and without using rosbag file ? If yes ,then how it can be done ? |
| 2017-10-31 04:51:47 -0500 | received badge | ● Notable Question (source) |
| 2017-10-31 04:40:20 -0500 | received badge | ● Notable Question (source) |
| 2017-09-19 06:15:18 -0500 | marked best answer | Robot can not avoid obstacle in navigation stack Hi, I am using ros-indigo on ubuntu 14.04 LTS. I am trying to use navigation stack, but I have some problem. My robot can move "Initial Pose" to "goal", But can't avoid obstacles. Whether the obstacle require plugins (costmap_2d::StaticLayer) to be inserted in configuration file. Please can one suggest me asap. Thank's in advanced. My configuration files are as following: 1) common_costmap_params.yaml 2) global_costmap_params.yaml 3) local_costmap_params.yaml 4) dwa_local_planner.yaml 5) move_base_params.yaml |
| 2017-09-15 08:37:48 -0500 | received badge | ● Notable Question (source) |
| 2017-07-24 04:38:41 -0500 | received badge | ● Popular Question (source) |
| 2017-07-03 07:57:23 -0500 | asked a question | How to define values in Calibration File for FOV camera model How to define values in Calibration File for FOV camera model Hi, I am using DSO package. In DSO there is a camera.txt f |
| 2017-06-06 09:42:51 -0500 | received badge | ● Notable Question (source) |
| 2017-05-15 03:57:38 -0500 | received badge | ● Famous Question (source) |
| 2017-04-12 04:31:28 -0500 | asked a question | Facing issues in fovis_ros : NO_DATA and REPROJECTION_ERROR Hello I am using ROS-indigo distribution on ubuntu 14.04 LTS. I am trying to execute fovis_ros package for visual Odometery, but I am facing some problems in it. I have properly configured the fovis_ros package on PC. I have created the following fovis_ros.launch , which publishes /odom topic .I have used kinect camera for the depth and rgb imagee, But When I launch fovis launch file I am getting the following warning in it . My fovis_ros.launch file are : <launch> <node pkg="tf" type="static_transform_publisher" name="base_link_to_camera" args="0.0 0.0 0.81 -1.5707 0.0 -1.5707 base_link camera_link 100"/> <node pkg="nodelet" type="nodelet" args="manager" name="nodelet_manager"/> <node pkg="nodelet" type="nodelet" name="convert_openni_fovis" args="load depth_image_proc/convert_metric nodelet_manager"> <remap from="image_raw" to="/camera/hd/image_depth_rect"/> <remap from="image" to="/camera/hd/image_depth_rect_1"/> </node> <node pkg="fovis_ros" type="fovis_mono_depth_odometer" name="fovis_mono_depth_odometer" output="screen"> </node> </launch>
|
| 2017-02-28 20:50:19 -0500 | received badge | ● Popular Question (source) |
| 2017-02-08 22:44:07 -0500 | commented question | rtabmap localization issue Okay,and My fixed frame on rviz is /map frame |
| 2017-02-08 22:44:07 -0500 | received badge | ● Commentator |
| 2017-02-08 22:38:49 -0500 | received badge | ● Famous Question (source) |
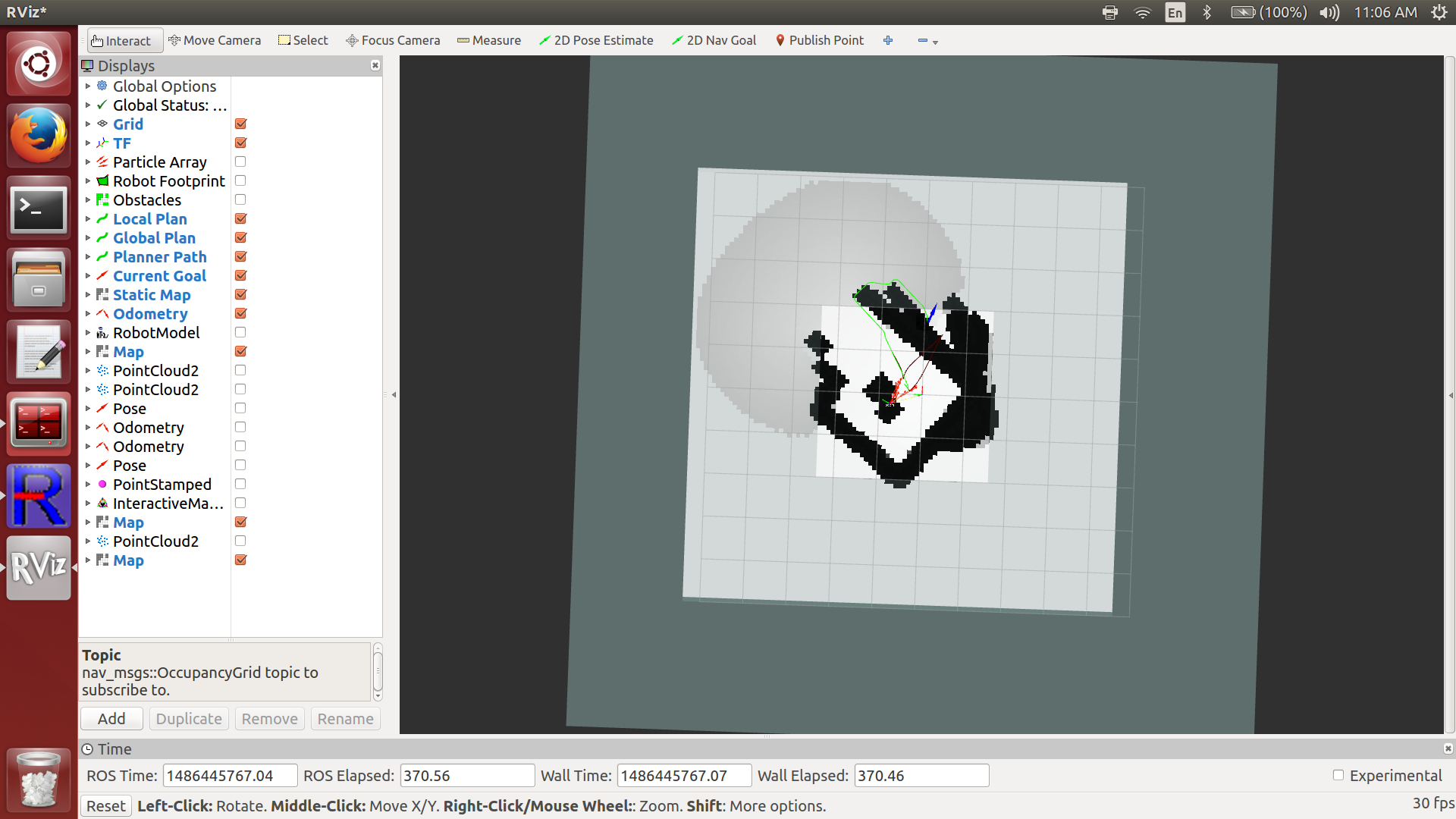
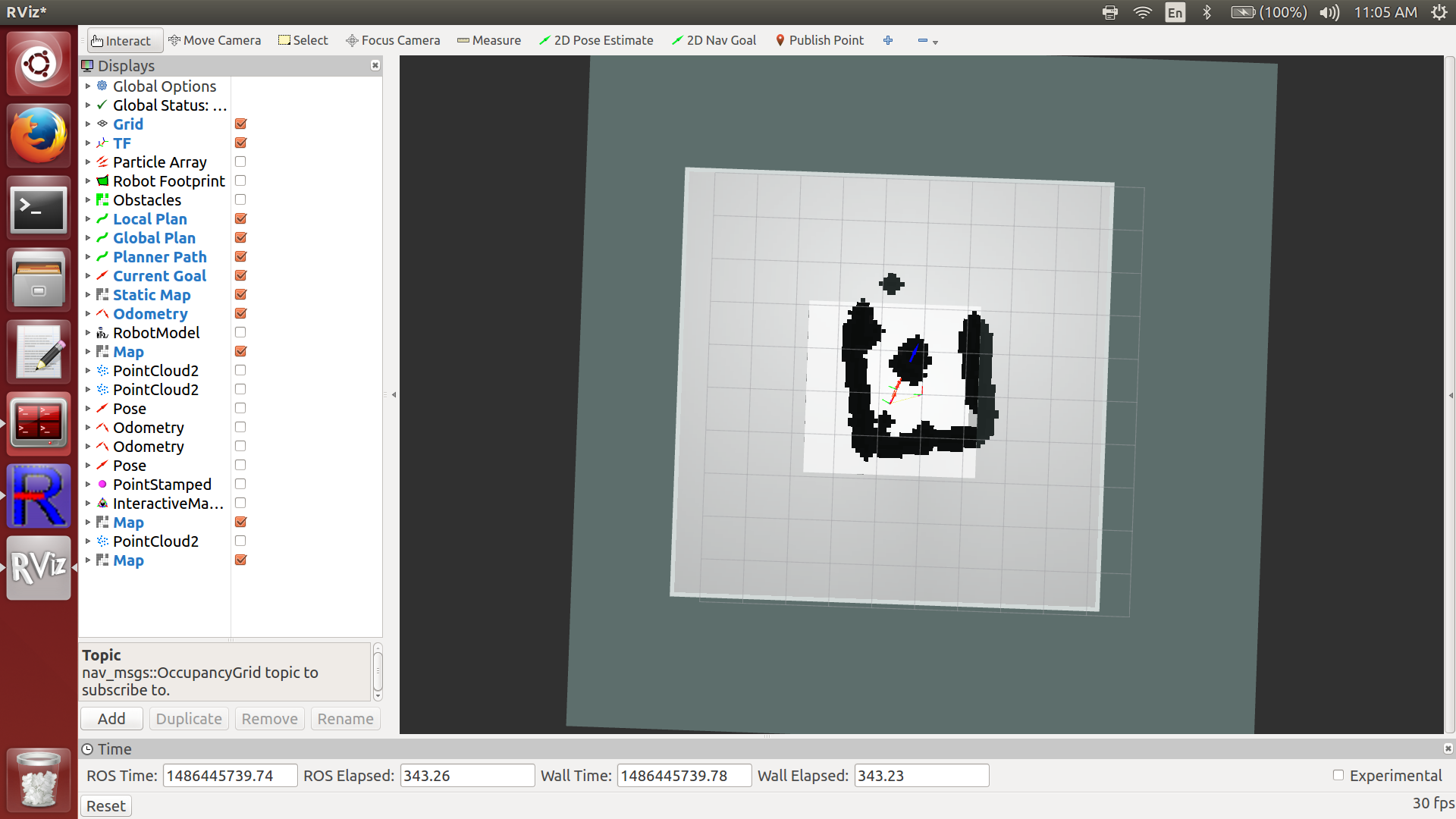
| 2017-02-07 23:55:25 -0500 | commented question | rtabmap localization issue Also the local_map changes its behavior when the global_map gets disappear as seen in Image 3rd |
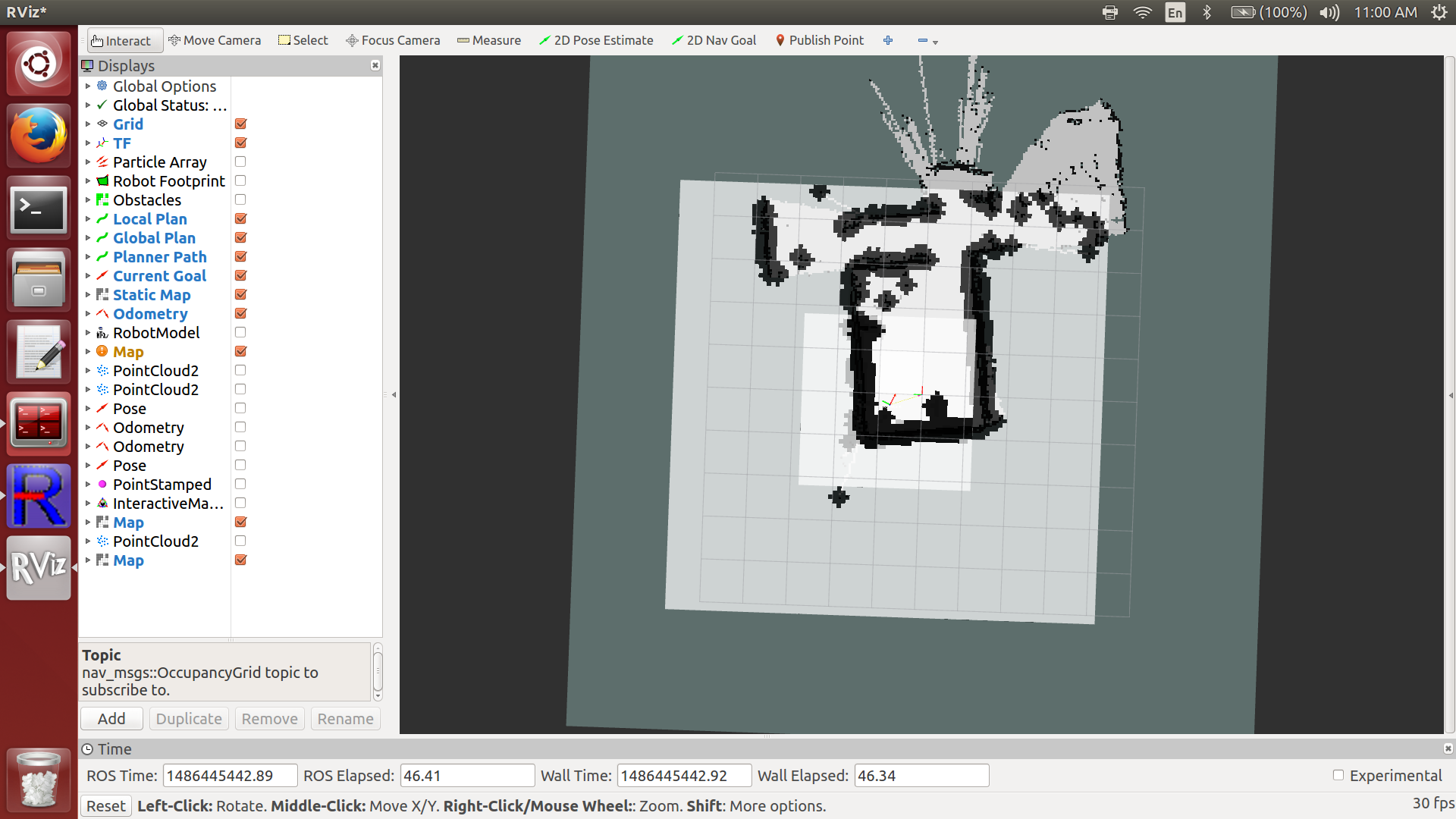
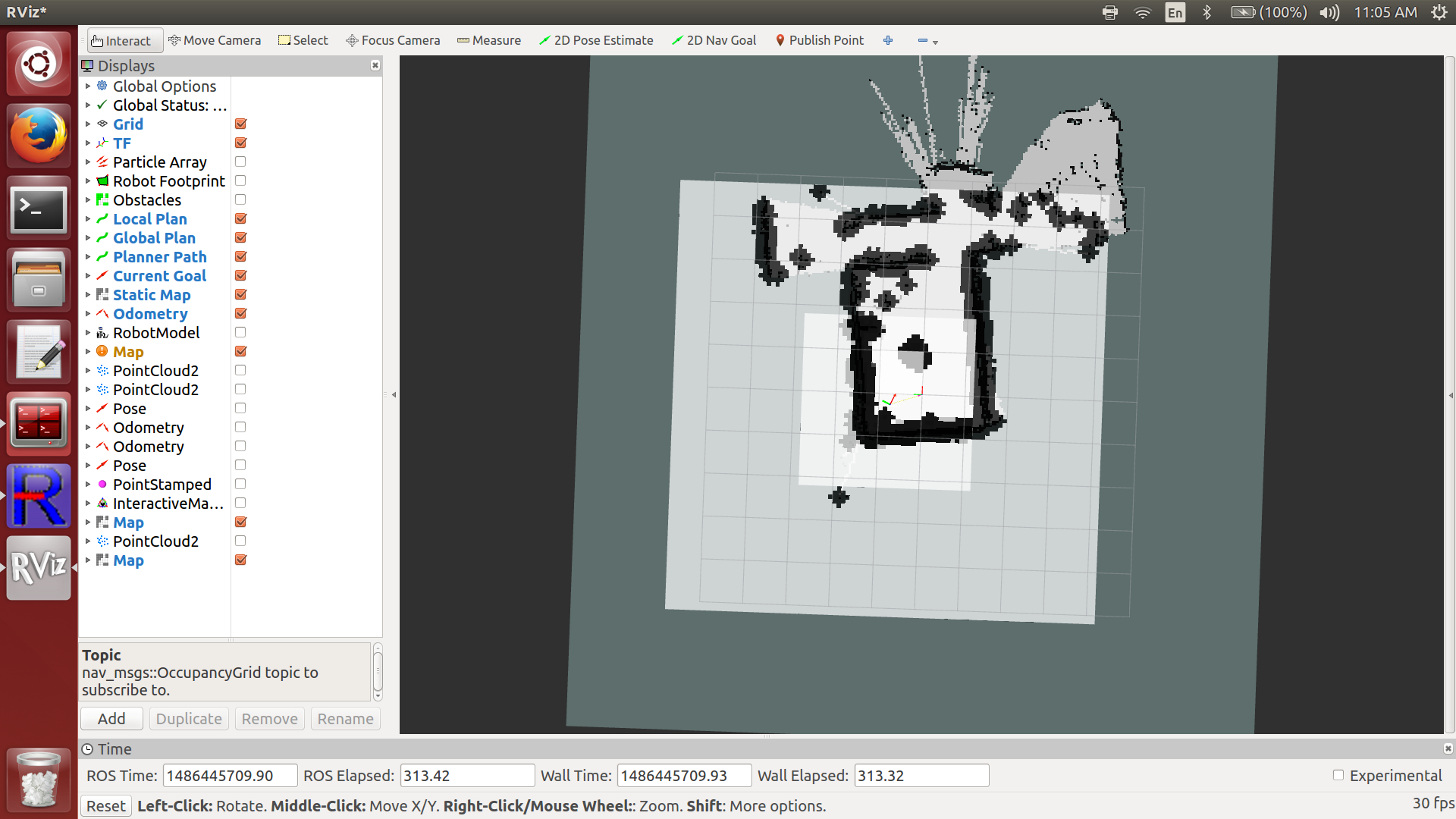
| 2017-02-07 23:53:05 -0500 | commented question | rtabmap localization issue Hello In 2nd image as you can see the the robot initial position as /base_link (frame ) when we give goal to the robot behind the Obstacle , the robot while avoiding the obstacle it loses its Global_map as in the 3rd image the /global_map has disappear , why this happens so please can you suggest me |
| 2017-02-07 09:03:23 -0500 | commented question | rtabmap localization issue Thanks for suggestion I attached the screenshots. |
| 2017-02-07 04:30:24 -0500 | received badge | ● Notable Question (source) |
| 2017-02-06 23:43:09 -0500 | received badge | ● Popular Question (source) |
| 2017-02-06 01:24:36 -0500 | asked a question | rtabmap localization issue Hi, I am facing one issue during localization in rtabmap. When there is an dynamic obstacle in front of the robot an even during the navigation time map data gets some times disappears on rviz and the robot gets delocalized. Why this happens so? What is the solution for this so that there is continuous update of map from rtabmap? Please suggest as soon as possible. Thanks. EDIT: 1) map_with_rviz.png 2) map_with_obstacle.png C:\fakepath\map_with_obstacle.png 3) disappear_map_with_obstacle.png C:\fakepath\map_with_delocalize.png 4) disappear_map_with_obstacle_1.png |
| 2017-02-01 04:51:41 -0500 | commented answer | Issue facing in rtabmap_ros during localization at night time Sorry for the late reply. And your suggestion work for me. Thanks for reply. |
| 2017-01-31 07:57:25 -0500 | received badge | ● Popular Question (source) |
| 2017-01-16 23:15:08 -0500 | answered a question | Robot can not avoid obstacle in navigation stack Hi, Sorry for late reply. I added following plugins in global_costmap_params.yaml and local_costmap_params.yaml which solved the problem. plugins: |
| 2017-01-16 23:01:08 -0500 | asked a question | Issue facing in rtabmap_ros during localization at night time Hi, I am working on one project for which I am using rtabmap_ros package for localization, but I am facing one issue in it. As we knew rtabmap_ros package uses the following image data for mapping and localization. During day time the pkg localizes the mobile robot perfectly without any issue But at evening time, as we make light's on, it doesn't gets localize at some position. Please can any one suggest me Why it's not getting localize and what must be issue in. Or do we have to remap this image topic to other images type. Also Is there any parameter to solve this issue in rtabmap_ros pkg? |
| 2017-01-04 02:51:24 -0500 | received badge | ● Notable Question (source) |
| 2016-12-21 03:25:54 -0500 | edited question | Robot behavior when keep an obstacle on the goal Hi, I am using teb_local_planner in navigation stack. My observation when I keep an obstacle on the goal that time teb_local_planner gets failed and gives a following warnings : WARNING : TebLocalPlannerROS: trajectory is not feasible, Resetting planner .... WARNING : teb_local_planner was not able to obtain a local plan for the current setting. Please can anyone suggest me what should be the robot behavior near the obstacle. Thank's in advanced. |
| 2016-12-20 23:23:31 -0500 | asked a question | Obstacle information in teb_local_planner Hi, I am using teb_local_planner in navigation stack. Which package provides dynamic obstacles (teb_local_planner/ObstacleMsg) message to the teb_local_planner Please can anyone suggest me and Is there any other package in ros which provides information of dynamic obstacle?. Thank's in advanced. |
| 2016-12-20 23:14:18 -0500 | commented question | Robot can not avoid obstacle in navigation stack Yes I can see the obstacle in rviz. |
| 2016-12-20 10:17:10 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}