
rtabmap localization issue


Hi,
I am facing one issue during localization in rtabmap. When there is an dynamic obstacle in front of the robot an even during the navigation time map data gets some times disappears on rviz and the robot gets delocalized. Why this happens so? What is the solution for this so that there is continuous update of map from rtabmap? Please suggest as soon as possible. Thanks.
EDIT:
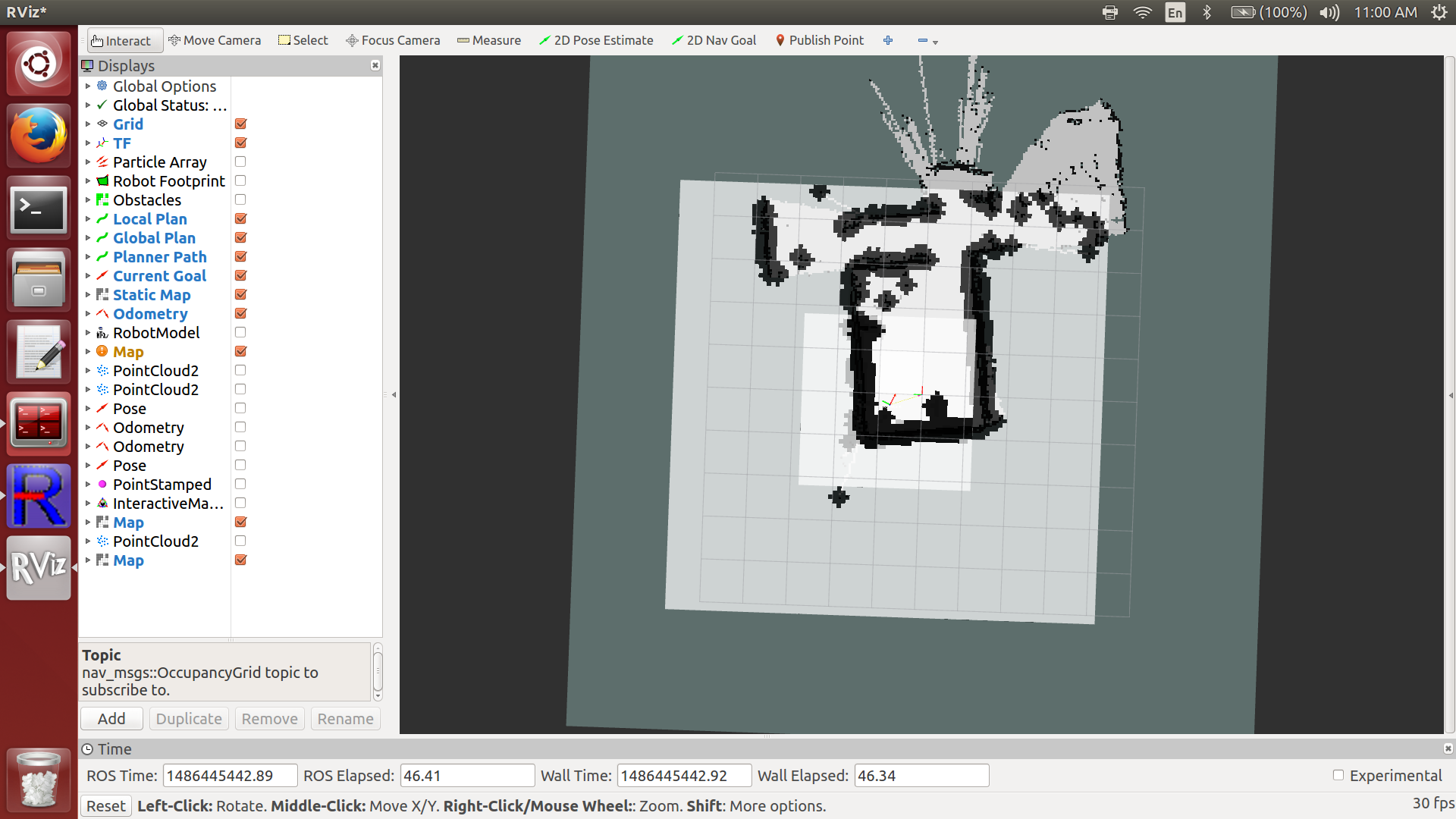
1) map_with_rviz.png
2) map_with_obstacle.png
C:\fakepath\map_with_obstacle.png 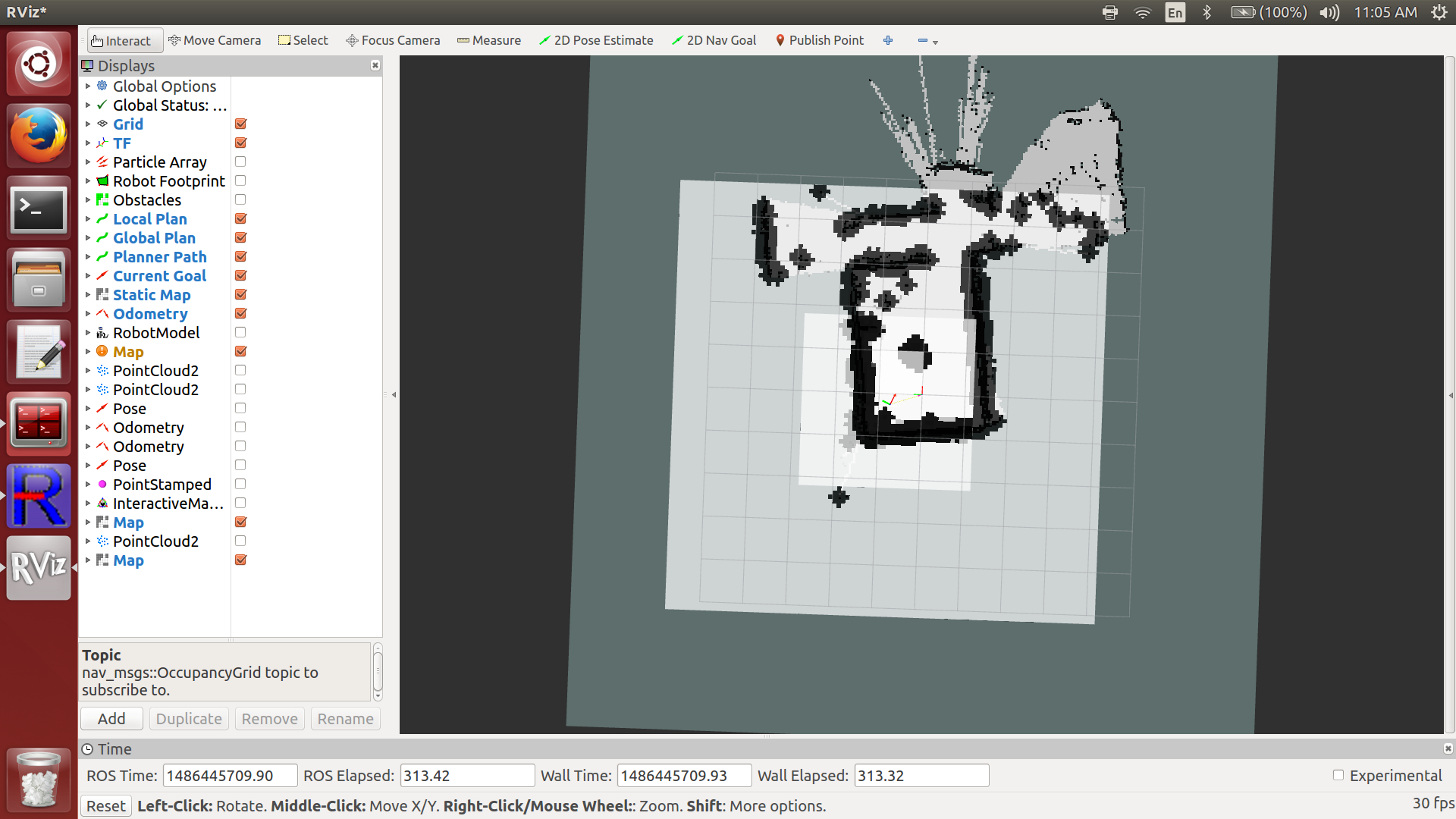
3) disappear_map_with_obstacle.png
C:\fakepath\map_with_delocalize.png 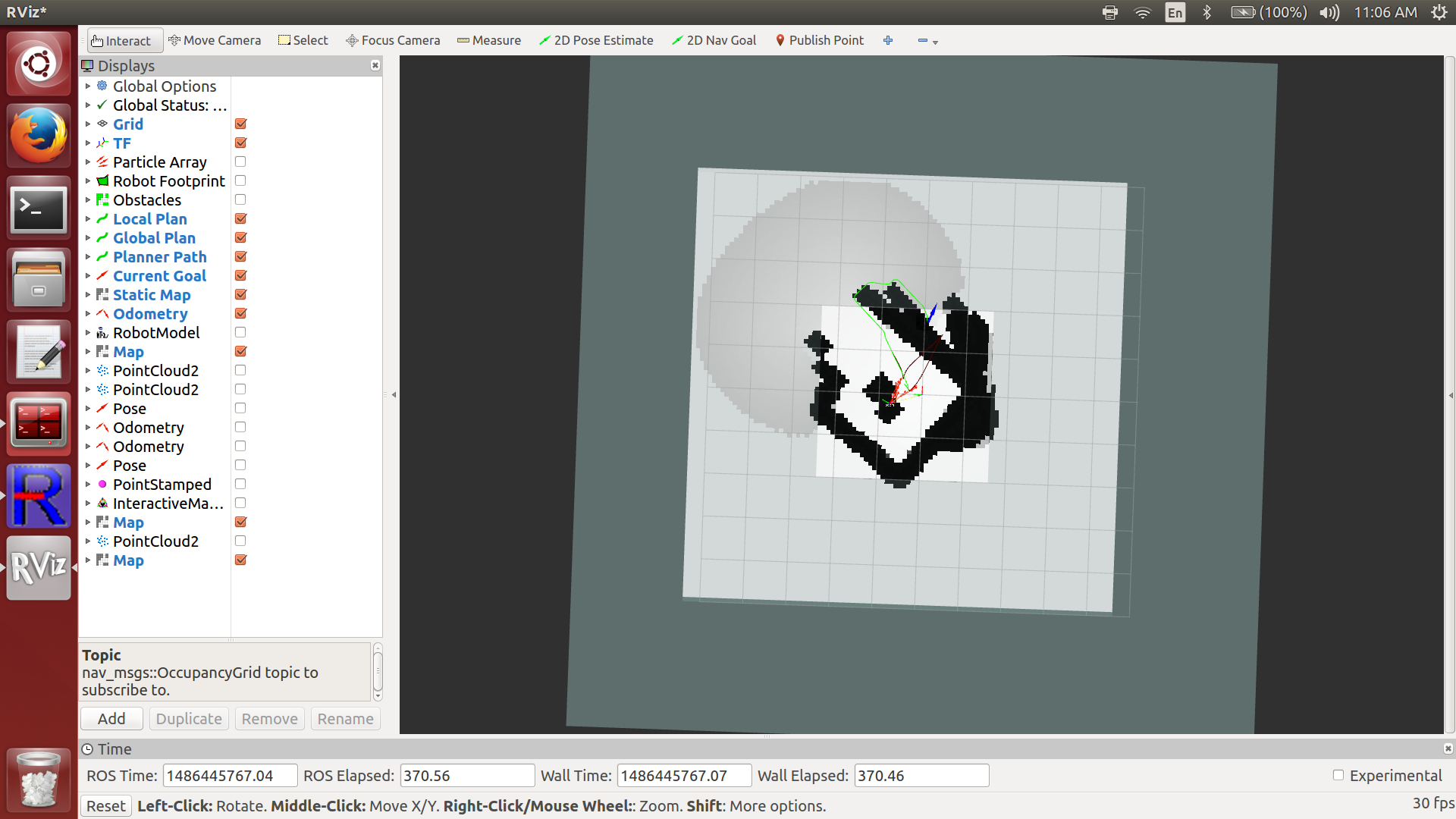
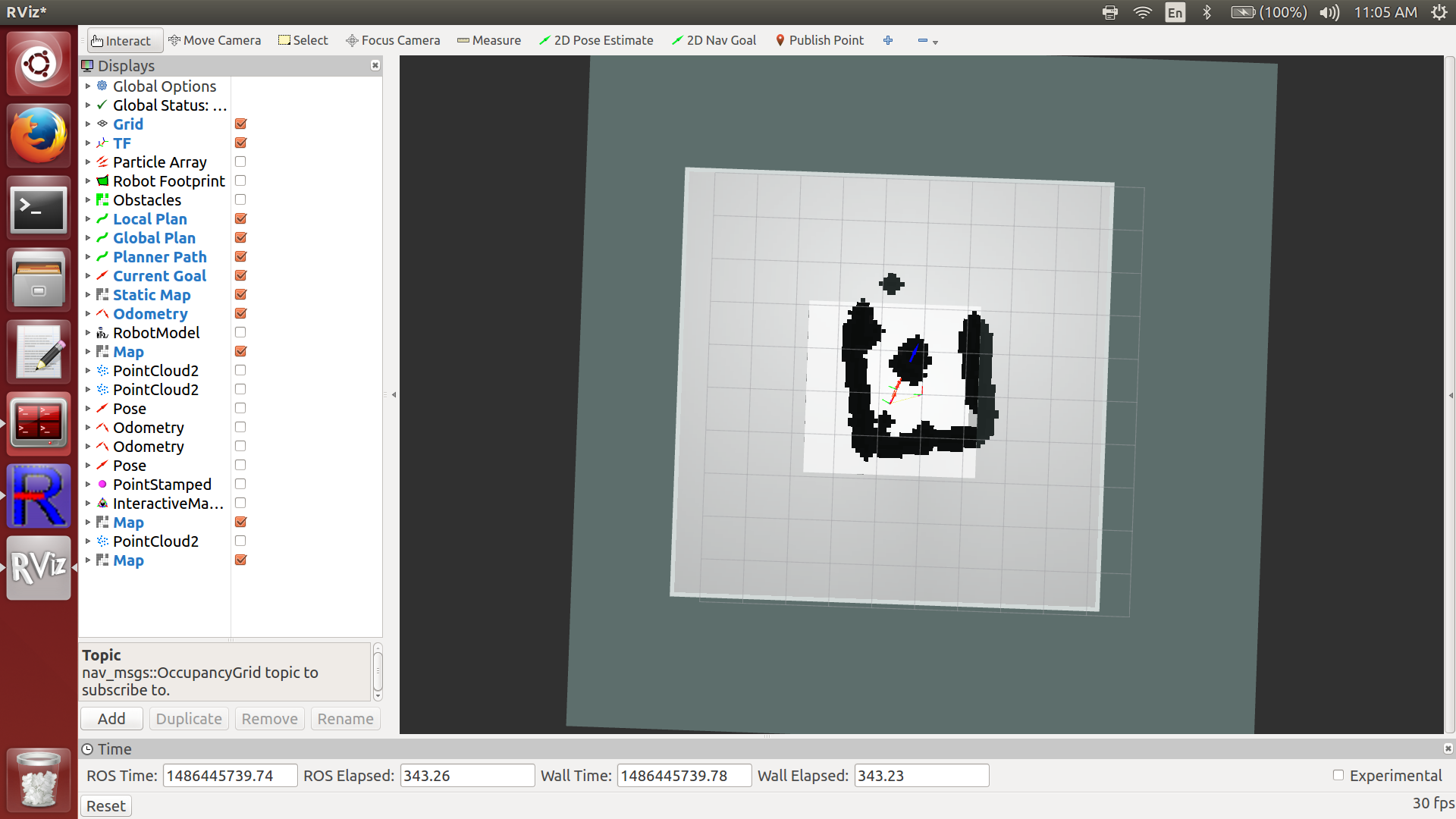
4) disappear_map_with_obstacle_1.png

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Please don't link to images on cloud services, attach them to this post.
Please do this as soon as possible. Thanks.
Thanks for suggestion I attached the screenshots.
What happens between 2 and 3? Robot moved?
Hello In 2nd image as you can see the the robot initial position as /base_link (frame ) when we give goal to the robot behind the Obstacle , the robot while avoiding the obstacle it loses its Global_map as in the 3rd image the /global_map has disappear , why this happens so please can you suggest me
Also the local_map changes its behavior when the global_map gets disappear as seen in Image 3rd
the local costmap should not change if the global map changes. Make sure your local costmap is in /odom frame, not /map frame. What is your fixed frame in RVIZ?
Okay,and My fixed frame on rviz is /map frame
What is the output on the terminal where rtabmap is launched?