The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2018-12-19 02:05:26 -0500 | received badge | ● Supporter (source) |
| 2016-12-28 00:39:19 -0500 | received badge | ● Famous Question (source) |
| 2016-12-16 05:32:13 -0500 | received badge | ● Famous Question (source) |
| 2016-12-16 05:32:13 -0500 | received badge | ● Notable Question (source) |
| 2016-11-13 11:50:21 -0500 | received badge | ● Famous Question (source) |
| 2016-10-24 10:01:48 -0500 | received badge | ● Popular Question (source) |
| 2016-10-24 10:01:48 -0500 | received badge | ● Famous Question (source) |
| 2016-10-24 10:01:48 -0500 | received badge | ● Notable Question (source) |
| 2016-07-26 07:44:13 -0500 | commented question | Connecting SICK TIM 571 via Ethernet to Ubuntu 14.04 @Naman have you resolved your issue. And can you tell me how ? i have the similar issue as yours |
| 2016-07-26 07:43:45 -0500 | answered a question | Connecting SICK TIM 571 via Ethernet to Ubuntu 14.04 @Naman have you resolved your issue. And can you tell me how ? i have the similar issue as yours |
| 2016-07-19 14:19:35 -0500 | received badge | ● Notable Question (source) |
| 2016-07-14 07:06:25 -0500 | commented question | Robot Localizing and path finding : lsd_slam Error @KDROS so, did you use lsd_slam for odometry of your robot ? |
| 2016-06-28 12:47:28 -0500 | received badge | ● Famous Question (source) |
| 2016-06-28 05:09:12 -0500 | commented answer | can hector_slam be used to create 3D models? yes i have used imu in the setup, but i am thinking of writing a blog or something like this on it. first see the video, there are some errors but they can be removed using a better hardware |
| 2016-06-28 05:01:12 -0500 | asked a question | Viso2_ros covariance matrix problem and robot_locaization (ekf) hi, I want to use viso2_ros with monochromatic camera to determine the visual odometry and fuse it with the imu orientation. As viso2_ros does not publish any covariances so we used the pose and twist covariances given in stereo_odometry code. But still the robot_localization(ekf) is not fusing the visual odometry values with the IMU. I tried to run the ekf with only visual odometry sensor but the ekf can not read the messages given at the odom topic. my ekf_templete launch file is given here. I dnt know whether it is the covariance issue due to which ekf is not fusing the visual odometry :/ |
| 2016-06-27 13:05:11 -0500 | received badge | ● Necromancer (source) |
| 2016-06-27 05:38:43 -0500 | answered a question | can hector_slam be used to create 3D models? i was successful in generating a 3D map of the indoor environments (somewhat rough). I have used hector_localization and hector_mapping for localizing my robot in a 3D environment and octomapps for generating the maps. hector_localization is provided with imu messages and poseupdate topic from the hector_mapping node. Thanks to Stefan for providing the file which is linked in this answer |
| 2016-06-14 02:23:13 -0500 | answered a question | Hi Everyone, i want to get some of my apm data to ROS for doing 3D SLAM. For that i am using MAVROS. i successfully installed the mavros but when i echo my topics, some of them publish data but others not. rosservice call /mavros/set_stream_rate 0 10 1 use the above command to start publishing other datas as well |
| 2016-06-11 10:40:35 -0500 | received badge | ● Popular Question (source) |
| 2016-06-09 23:50:57 -0500 | received badge | ● Notable Question (source) |
| 2016-05-18 10:39:26 -0500 | commented answer | For mapping, what should i do after connecting to the laser? better results |
| 2016-05-18 10:25:15 -0500 | received badge | ● Teacher (source) |
| 2016-05-18 10:20:19 -0500 | commented answer | For mapping, what should i do after connecting to the laser? share you tutorial.launch and mapping_default.launch files |
| 2016-05-18 10:18:12 -0500 | commented answer | For mapping, what should i do after connecting to the laser? no keep it to 50hz. then... its more than enough |
| 2016-05-18 07:40:52 -0500 | commented answer | For mapping, what should i do after connecting to the laser? Do not yaw too much for getting the accurate map. Basically it depends on the frequency and range of the laser scanner you are using. Hector_slam is build for scanners of 25-30hz. Otherwise keep you scanner level with ground and avoid abrupt movements and yawing |
| 2016-05-18 07:36:28 -0500 | commented answer | Hi everyone, i am new to ROS and i want to make a 3D map using a lidar and a kinect. Is it possible? Added the photo above for reference |
| 2016-05-18 07:32:39 -0500 | edited question | Hi everyone, i am new to ROS and i want to make a 3D map using a lidar and a kinect. Is it possible?
|
| 2016-05-18 07:28:36 -0500 | commented answer | Hi everyone, i am new to ROS and i want to make a 3D map using a lidar and a kinect. Is it possible? @Stefan the problem is here, how can i feed orientation, velocity and turn rate to scanmathcer ? |
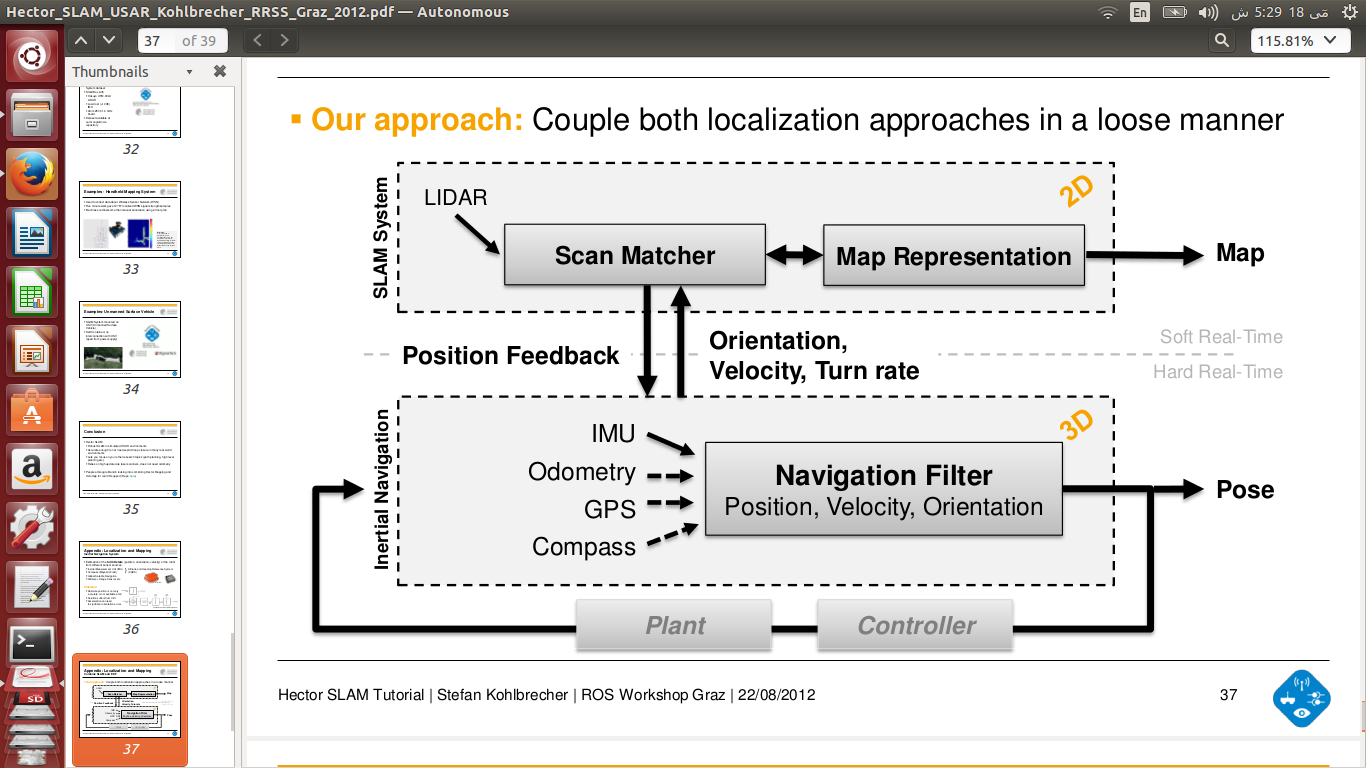
| 2016-05-18 07:27:26 -0500 | commented answer | Hi everyone, i am new to ROS and i want to make a 3D map using a lidar and a kinect. Is it possible? As in you slides you have mentioned that localization and slam node must be loosely coupled and localization node must subscribe to imu, magnetometer, gps and poseupdate(from slam node) and must sent back the orientation, turn rate and velocity. |
| 2016-05-18 07:22:40 -0500 | commented answer | Hi everyone, i am new to ROS and i want to make a 3D map using a lidar and a kinect. Is it possible? Hi @Stefan, i have successfully build a 3D map using hector_slam and octomaps and hector_localization. But there is just one issue which is after some time my robot looses its position and the map goes to infinity :P |
| 2016-05-18 06:52:29 -0500 | commented answer | For mapping, what should i do after connecting to the laser? welcome... kindly mark it as an answer :) |
| 2016-05-07 06:21:50 -0500 | answered a question | For mapping, what should i do after connecting to the laser? go for hector_slam if you want to create a floor plan of the environment. First you need to make sure that your laser data is publishing on a /scan topic and then run hector_mapping node available in hector_slam package http://wiki.ros.org/hector_slam if you browse through hector_slam_launch/launch files you will find tutorial launch file. this is the file you need to launch. next you have to edit your mapping_default.launch and tutorial.launch. In tutorial.launch file, add these lines at the end <node pkg="tf" type="static_transform_publisher" name="map_baselink_broadcaster" args="0 0 0 0 0 0 map base_link 100"/> <node pkg="tf" type="static_transform_publisher" name="baselink_laser_broadcaster" args="0 0 0 0 0 0 base_link laser 100"/> and also set use_sim_time to 'false' In mapping_default file, use following configuration "map_frame" value="map" /> "base_frame" value="base_link" /> "odom_frame" value="base_link" /> hope this solves your query |
| 2016-05-03 10:30:22 -0500 | received badge | ● Popular Question (source) |
| 2016-04-30 07:51:08 -0500 | received badge | ● Editor (source) |
| 2016-04-30 07:48:33 -0500 | asked a question | Hi Everyone, i want to get some of my apm data to ROS for doing 3D SLAM. For that i am using MAVROS. i successfully installed the mavros but when i echo my topics, some of them publish data but others not. THIS is what it shows when i launch apm2.launch file. Built-in SIMD instructions: SSE, SSE2 Built-in MAVLink package version: 2016.4.4 [ INFO] Built-in MAVLink dialect: ardupilotmega [ INFO] MAVROS started. MY ID 1.240, TARGET ID 1.1 [ERROR] FCU: Calibrating barometer [ INFO] CON: Got HEARTBEAT, connected. FCU: ArduPilotMega [ERROR] FCU: barometer calibration complete [ERROR] FCU: GROUND START [ WARN] VER: broadcast request timeout, retries left 4 [ WARN] VER: broadcast request timeout, retries left 3 [ WARN] VER: unicast request timeout, retries left 2 [ WARN] VER: unicast request timeout, retries left 1 [ WARN] VER: unicast request timeout, retries left 0 [ WARN] VER: your FCU don't support AUTOPILOT_VERSION, switched to default capabilities [ERROR] FCU: ArduCopter V3.2.1 (36b405fb) [ERROR] FCU: Frame: QUAD [ INFO] WP: mission received [ INFO] PR: parameters list received and these are the topics published /diagnostics /mavlink/from /mavlink/to /mavros/altitude /mavros/battery /mavros/cam_imu_sync/cam_imu_stamp /mavros/extended_state /mavros/global_position/compass_hdg /mavros/global_position/global /mavros/global_position/local /mavros/global_position/raw/fix /mavros/global_position/raw/gps_vel /mavros/global_position/rel_alt /mavros/imu/atm_pressure /mavros/imu/data /mavros/imu/data_raw /mavros/imu/mag /mavros/imu/temperature /mavros/local_position/odom /mavros/local_position/pose /mavros/local_position/velocity /mavros/manual_control/control /mavros/mission/waypoints /mavros/radio_status /mavros/rc/in /mavros/rc/out /mavros/rc/override /mavros/setpoint_accel/accel /mavros/setpoint_position/local /mavros/setpoint_raw/attitude /mavros/setpoint_raw/global /mavros/setpoint_raw/local /mavros/setpoint_raw/target_attitude /mavros/setpoint_raw/target_global /mavros/setpoint_raw/target_local /mavros/setpoint_velocity/cmd_vel /mavros/state /mavros/time_reference /mavros/vfr_hud /mavros/wind_estimation /rosout /rosout_agg /tf /tf_static i do /diagnostics and came to know that its because of the absence of GPS and other compulsory hardware. BUT i do not want to use GPS and compass data THANKS in advance! |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.