
Hi everyone, i am new to ROS and i want to make a 3D map using a lidar and a kinect. Is it possible?
 https://www.youtube.com/watch?v=jgNFe...
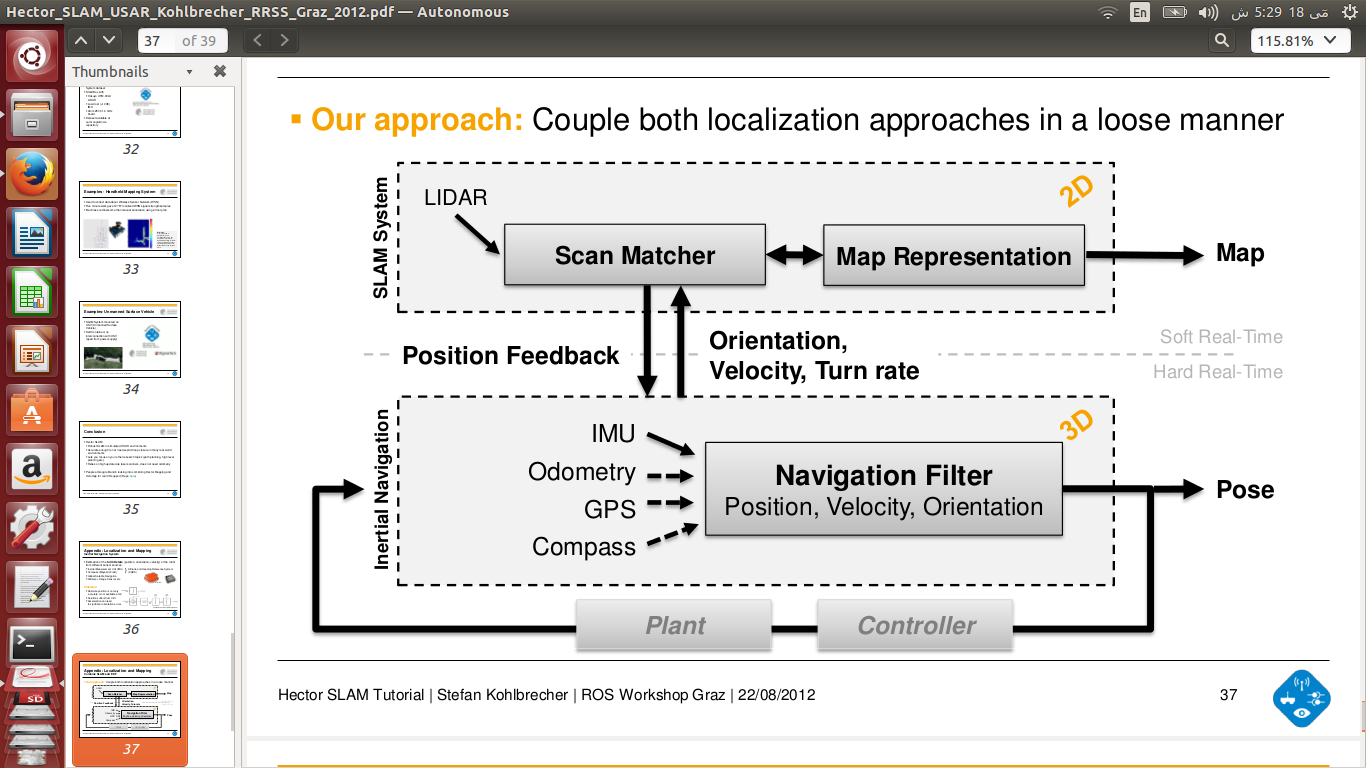
like the video above, they have used a hokuyo lidar to 2D map the environment using the hector_slam package and then generate an octomap using a kinect sensor i guess. I am not sure how can i do this? lets suppose i have generated the 2D map and octomap separately then how can i combine both like in the video
thanks in advance!
https://www.youtube.com/watch?v=jgNFe...
like the video above, they have used a hokuyo lidar to 2D map the environment using the hector_slam package and then generate an octomap using a kinect sensor i guess. I am not sure how can i do this? lets suppose i have generated the 2D map and octomap separately then how can i combine both like in the video
thanks in advance!
add a comment

