
move_base start position is off the global costmap
Hi all,
after following this tutorial http://www.ros.org/wiki/navigation/Tutorials/RobotSetup#Global_Configuration and run rviz when I try to give a 2d nav goal in the map the shell output this error:
The robot's start position is off the global costmap. Planning will always fail, are you sure the robot has been properly localized?
someone have any idea what I'm doing wrong?
thanks for your attention
EDIT 1: thanks @ayush_dewan for your answer, I checked my tf tree typing
rosrun rqt_tf_tree rqt_tf_tree

and the rqt_graph
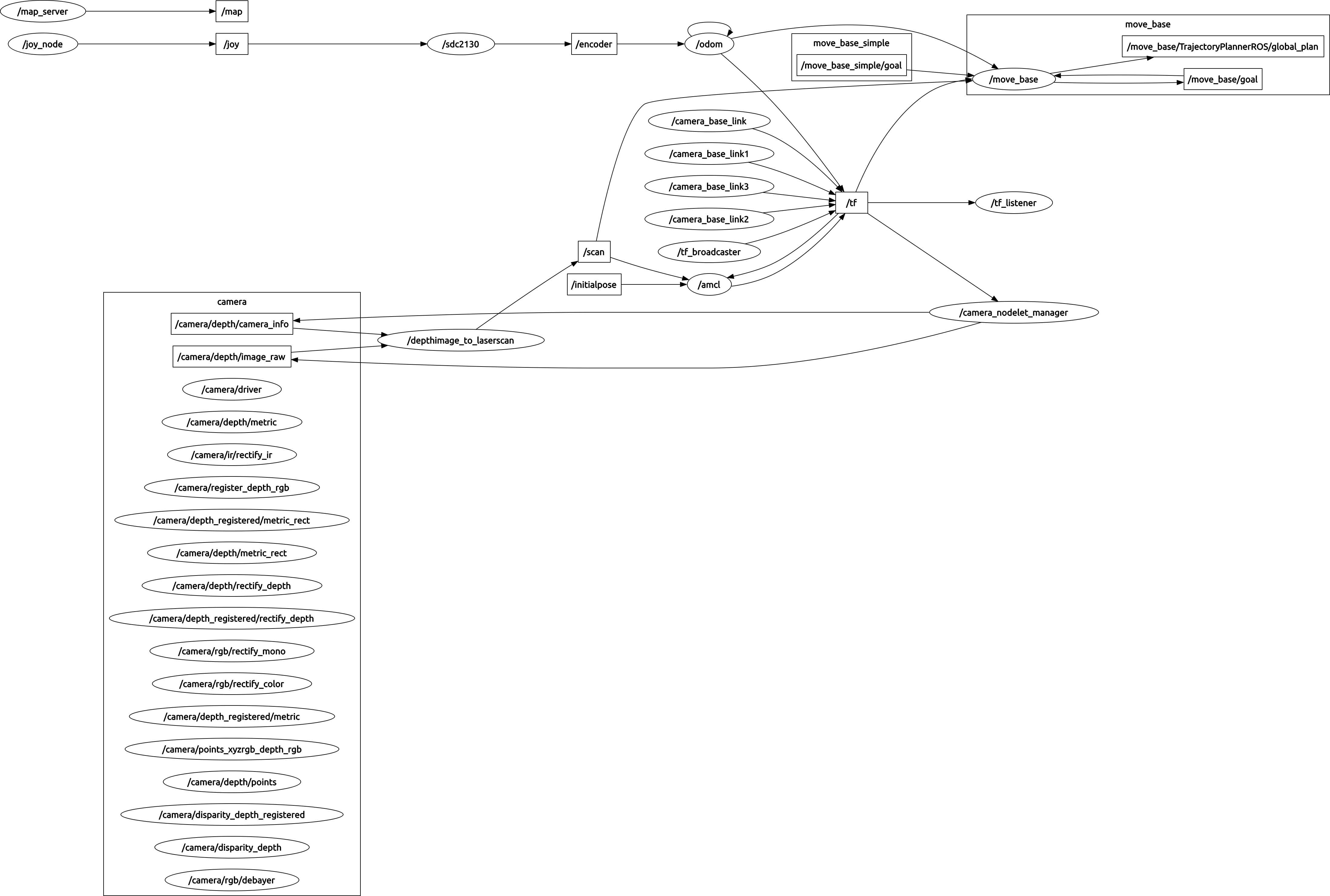
I see that the map server is not connected with the main tree but it is in the tf tree.
I don't understand if is a map trouble (type of the map, resolution,...) or a tf issue.
Edit 2: Tryed the tf_echo command with the following output:
rosrun tf tf_echo /map /base_link
At time 1374093690.903
- Translation: [-0.002, 0.006, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.003, 1.000]
in RPY [0.000, -0.000, 0.005]
rosrun tf tf_echo /map /odom
At time 1374093829.437
- Translation: [-0.224, 0.066, 0.000]
rosrun tf tf_echo /odom /base_link
At time 1374093875.303
- Translation: [0.224, -0.051, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.022, 1.000]
in RPY [0.000, -0.000, 0.045]
- Rotation: in Quaternion [0.000, 0.000, -0.020, 1.000]
in RPY [0.000, 0.000, -0.039]
it seems to me that all is going well, or better no error is coming out.
Could you please specify a little more where the issue could be? Thanks
EDIT 3:thanks @ahendrix, this is my map.yalm code
image: map01.png
resolution: 0.02
origin: [-5.0, -5.0, 0.0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
and this the Rviz output
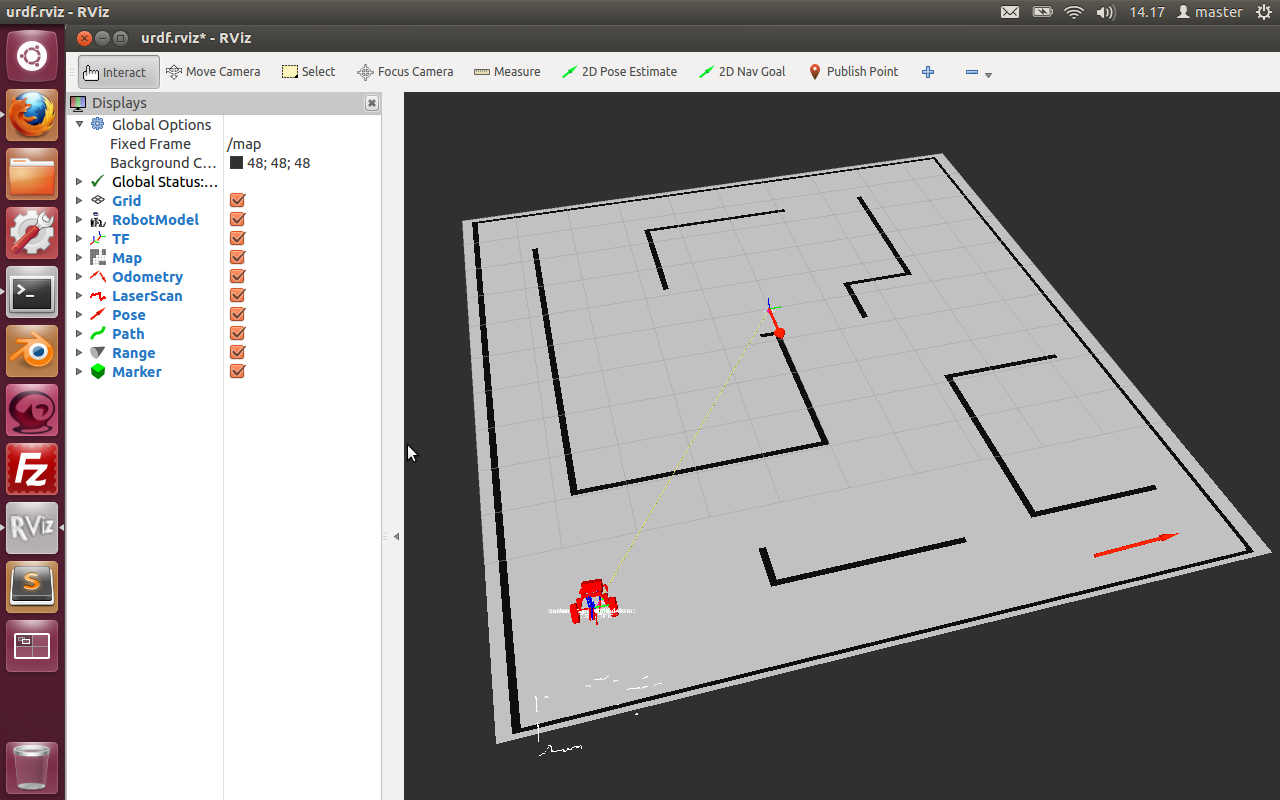
I hope this could be helpful.



Hello Daniel, Did you solve this problem? I have an identical problem too