
Ground plain is not visible, while using block_laser GAZEBO plugin [closed]
Hello all.
I trying to include in my car simulation a velodyn sensor. For this purpose i added to my car URDF model the "libgazebo_ros_block_laser.so" plugin :
<joint name="BLOCK_LIDAR_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.5 0 0.5"/>
<parent link="base_link"/>
<child link="BLOCK_LIDAR_link"/>
</joint>
<link name="BLOCK_LIDAR_link">
<inertial>
<mass value="0.01"/>
<origin xyz="0 0 0"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
<material name="green"/>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.01 0.01 0.01"/>
</geometry>
</collision>
</link>
<gazebo reference="BLOCK_LIDAR_link">
<sensor:ray name="dany_car_BLOCK_LIDAR_sensor">
<rayCount>180</rayCount>
<rangeCount>180</rangeCount>
<laserCount>1</laserCount>
<origin>0.0 0.0 0.0</origin>
<displayRays>false</displayRays>
<minAngle>-90</minAngle>
<maxAngle> 90</maxAngle>
<minRange>0.05</minRange>
<maxRange>100.0</maxRange>
<updateRate>10.0</updateRate>
<verticalRayCount>64</verticalRayCount>
<verticalRangeCount>64</verticalRangeCount>
<verticalMinAngle>-26.8</verticalMinAngle>
<verticalMaxAngle>2</verticalMaxAngle>
<controller:gazebo_ros_block_laser name="dany_car_LIDAR_BLOCK_controller" plugin="libgazebo_ros_block_laser.so">
<gaussianNoise>0.005</gaussianNoise>
<alwaysOn>true</alwaysOn>
<updateRate>10.0</updateRate>
<topicName>/dany_car_sensors/block_lidar/full_cloud</topicName>
<frameName>BLOCK_LIDAR_link</frameName>
<interface:laser name="dany_car_BLOCK_LIDAR_iface" />
</controller:gazebo_ros_block_laser>
</sensor:ray>
<turnGravityOff>true</turnGravityOff>
<material>Gazebo/Green</material>
</gazebo>
Everything seems to work fine, the URDF model is spawned in GAZEBO with no errors and the point cloud topic is advertise.
But still when i visualize the PointCloud in Rviz it's missing the points that belong to the ground plain. Instead i get weird points that appears beneath the ground plain directly beneath the existing objects.
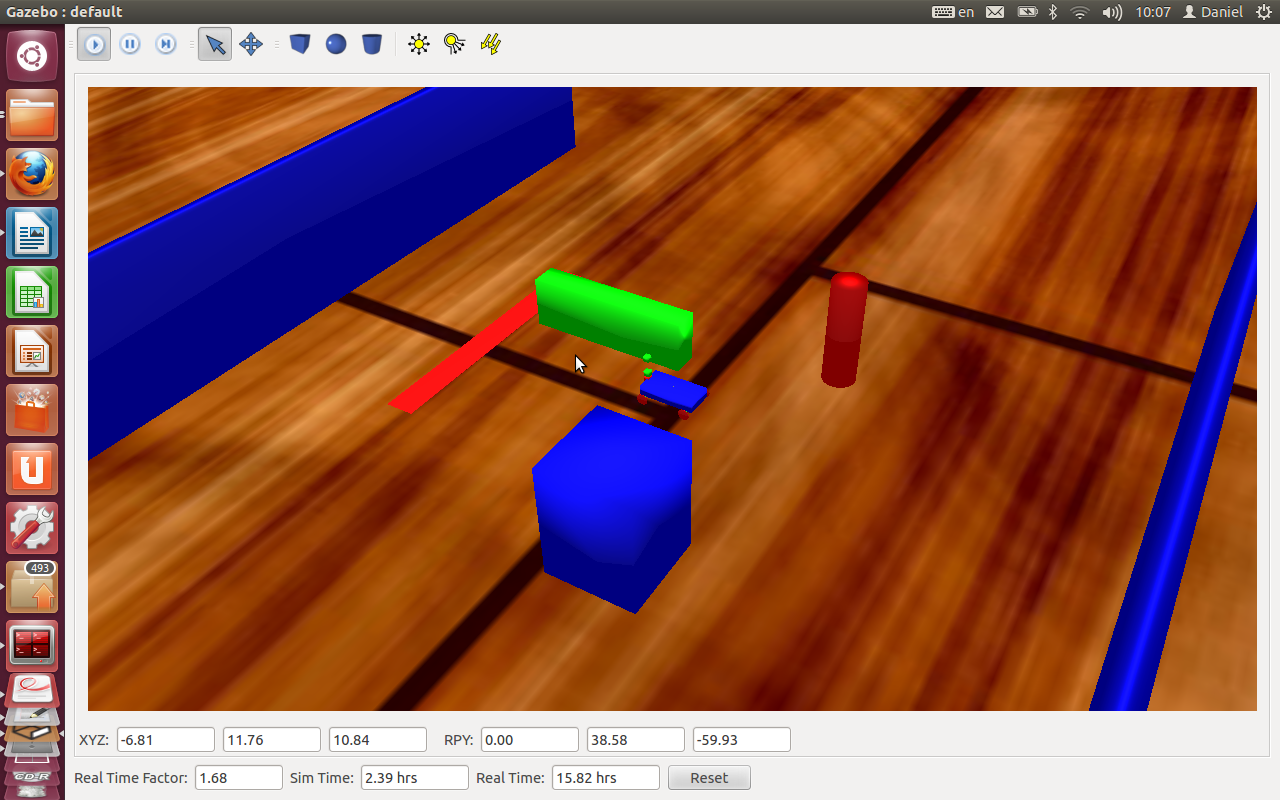
Beneath are print-screens of GAZEBO and RVIZ. the little blue rectangle in the middle is my car robot, the LIDAR sensor is directed to the left (towards the big blue wall).
GAZEBO :
RVIZ :
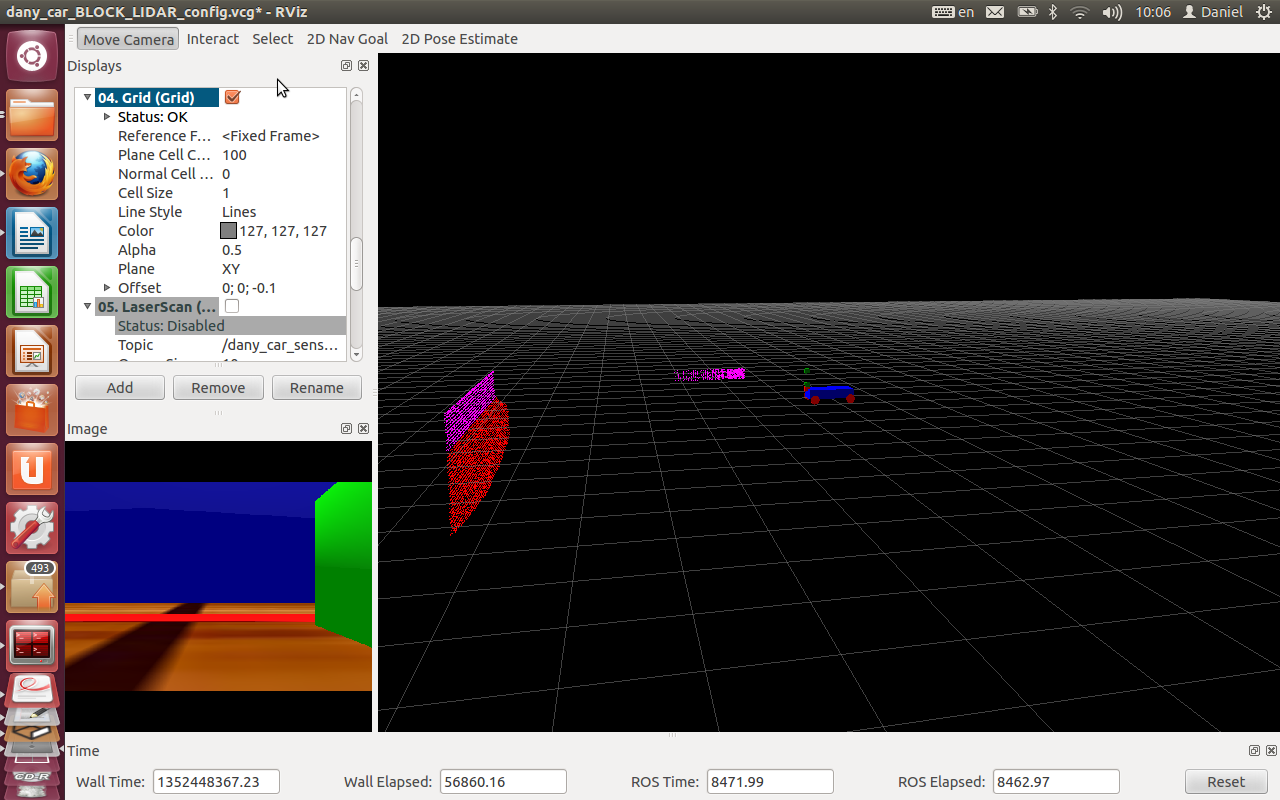
the red points are actually not existing and has negative Z values
Maybe someone can help me with that, thanks.
