
Why rotation is not match between aruco tag and tf?
I am using Aruco tag detection to detect aruco tags with the library in OpenCV then broadcast it to tf in ROS Noetic.
However, I found out that there is a problem:
When the tag is placed up right to the camera, the axis of tf is matched with the aruco detection like this
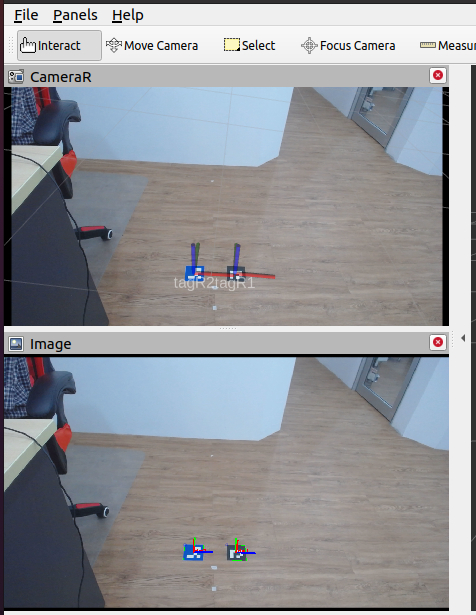 * Axis in camera is tf, axis in image is drawn with aruco library in OpenCV
* Axis in camera is tf, axis in image is drawn with aruco library in OpenCV
However, when the tag is rotated, then the axis of tf is NOT matched with the aruco detection:
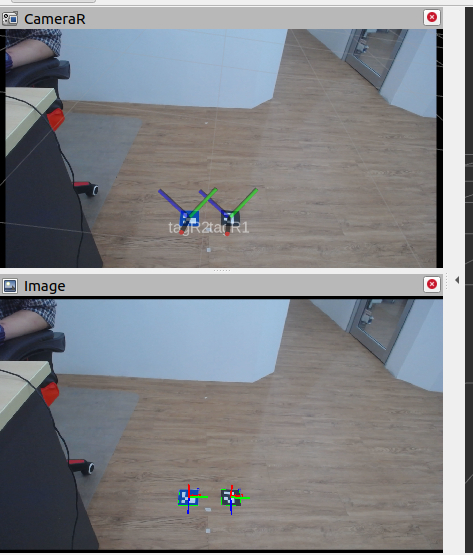 * Axis in camera is tf, axis in image is drawn with aruco library in OpenCV
* Axis in camera is tf, axis in image is drawn with aruco library in OpenCV
Why this happen? I just convert the eular angles to quaternion with r_tf = tf.transformations.quaternion_from_euler(r_aruco[0], r_aruco[1], r_aruco[2])
add a comment
