
rtabmap obstacle_detection error: lookup would require extrapolation into the future when looking up transform.

Hi everyone, I have a problem with using rtabmap obstacle_detection nodelet, I get the following error when trying to read the published topic ( in my case called /pointCloud_obstacles):
[ERROR] Lookup would require extrapolation -0.120000000s into the future. Requested time 1027.127000000 but the latest data is at time 1027.007000000, when looking up transform from frame [base_link] to frame [map]
The difference in the two times is always about 0.1 (seconds?) and it's also interesting how it says that it require extrapolation of a negative time into the future, so it seems more the past than the future.
I don't get any error if I do not access the topic (e.g. using rostopic hz or another node).
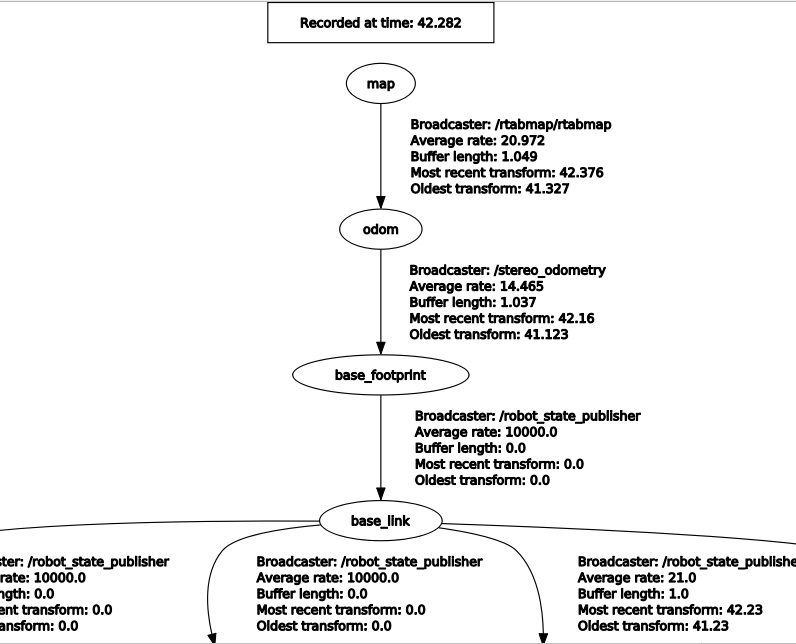
This is the relevant part of the tf tree:
This is my launch file, mainly taken from rtabmap outdoor mapping tutorial and from rtabmap outdoor navigation tutorial:
<param name="use_sim_time" type="bool" value="true"/>
<!--
-->
<!-- Stereo Odometry -->
<node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="/zed2/left/image_rect_color"/>
<remap from="right/image_rect" to="/zed2/right/image_rect_color"/>
<remap from="left/camera_info" to="/zed2/left/camera_info"/>
<remap from="right/camera_info" to="/zed2/right/camera_info"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="queue_size" type="int" value="20"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="wait_for_transform" type="bool" value="true"/>
<param name="Odom/Strategy" type="string" value="0"/> <!-- 0=BOW, 1=OpticalFlow -->
<param name="Odom/EstimationType" type="string" value="1"/> <!-- 3D->2D (PnP) -->
<param name="Odom/MinInliers" type="string" value="10"/>
<param name="Odom/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Odom/MaxDepth" type="string" value="10"/>
<param name="OdomBow/NNDR" type="string" value="0.8"/>
<param name="Odom/MaxFeatures" type="string" value="1000"/>
<param name="Odom/FillInfoData" type="string" value="$(arg rtabmapviz)"/>
<param name="GFTT/MinDistance" type="string" value="10"/>
<param name="GFTT/QualityLevel" type="string" value="0.00001"/>
</node>
<group ns="rtabmap">
<!-- Visual SLAM: args: "delete_db_on_start" and "udebug" -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="zed2_camera_center"/>
<param name="subscribe_stereo" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="true"/>
<remap from="odom" to="/odom"/>
<param name="queue_size" type="int" value="30"/>
<remap from="left/image_rect" to="/zed2/left/image_rect_color"/>
<remap from="right/image_rect" to="/zed2/right/image_rect_color"/>
<remap from="left/camera_info" to="/zed2/left/camera_info"/>
<remap from="right/camera_info" to="/zed2/right/camera_info"/>
<!-- RTAB-Map's parameters -->
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Kp/MaxFeatures" type="string" value="200"/>
<param name="Kp/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param ...

Hi @parmex, please take a look at this previous question #q357836 and please share the things that you have discarded. Please check both answers.
Hi @osilva,thank you for the suggestion! I already looked at that question and I found some hint on what could cause the problem but sadly not how to solve it. Anyway, I marked as accepted the answer below, as it solves my issue :)