
Walking Arm Robot (Swithing between two base links)
Good afternoon,
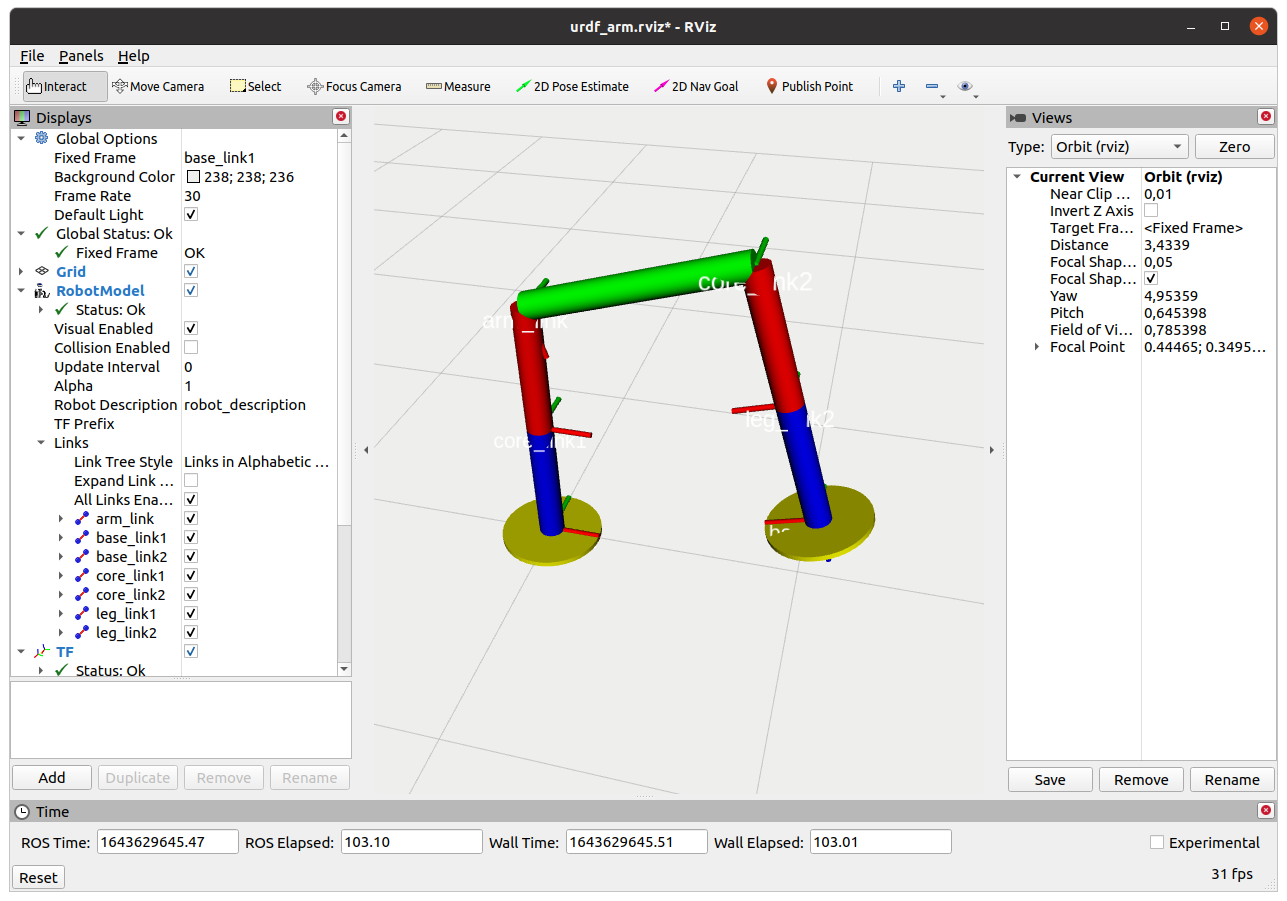
I'm trying to make a walking robot simulation, but with an arm robot. In other words, its two ends correspond to feet . I've completed the Urdf of the robot, here it is:
I'm planning to use a position control approach to simulate walking, and for this purpose, I'm considering MoveIt . My question is, is it possible to change the base link dynamically? If you have any suggestion, that would be great...
Thanks,
add a comment
