
how to get value of joints [closed]
Hello everyone!
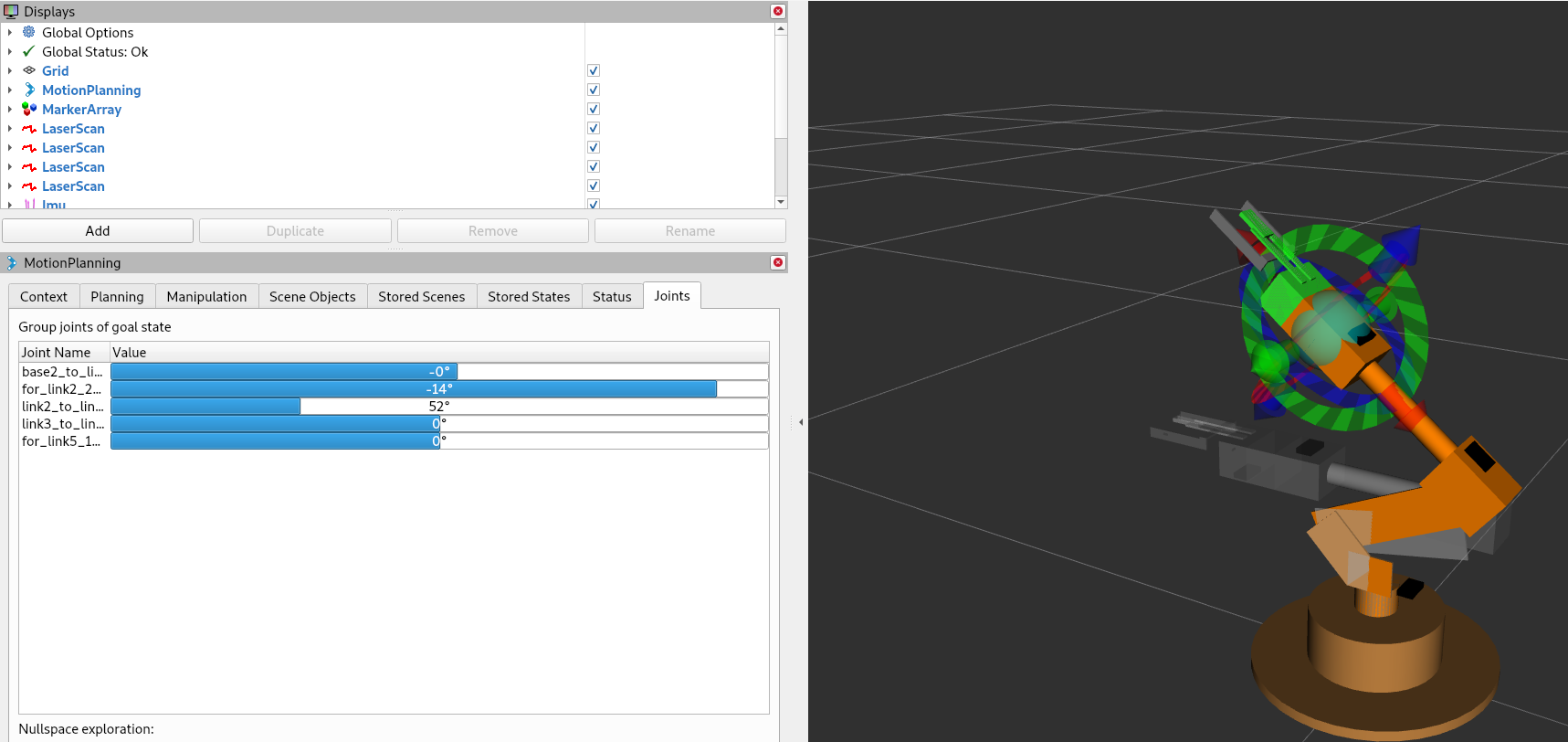
I have a manipulator (with MoveIt) and I can to set my joints manually (from -90 to 90).
I need to get values of joints from RVIZ to my code (to another program on Python like input values) after press the "Plan&Execute" button in the "Planning" tab.
How can I do that?
I don't want to get a coordinates of joint like [0.0032, 1.23453, -54.56342].
I want exactly these values (53 or -87 or something else).
There is one problem. I have a model with roscpp, not with rospy. And I have a launch file which I launch. It has the next code:
<launch>
<arg name="pipeline" default="ompl"/>
<arg name="db" default="false"/>
<arg name="db_path" default="$(find manipulator_moveit_config)/default_warehouse_mongo_db"/>
<arg name="debug" default="false"/>
<arg name="load_robot_description" default="true"/>
<arg name="execution_type" default="interpolate"/>
<arg name="use_gui" default="false"/>
<arg name="use_rviz" default="true"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" unless="$(arg use_gui)">
<rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" if="$(arg use_gui)">
<rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam>
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen"/>
<include file="$(dirname)/move_group.launch">
<arg name="allow_trajectory_execution" value="true"/>
<arg name="fake_execution" value="true"/>
<arg name="execution_type" value="$(arg execution_type)"/>
<arg name="info" value="true"/>
<arg name="debug" value="$(arg debug)"/>
<arg name="pipeline" value="$(arg pipeline)"/>
<arg name="load_robot_description" value="$(arg load_robot_description)"/>
</include>
<include file="$(dirname)/moveit_rviz.launch" if="$(arg use_rviz)">
<arg name="rviz_config" value="$(find manipulator_moveit_config)/launch/moveit.rviz"/>
<arg name="debug" value="$(arg debug)"/>
</include>
<include file="$(dirname)/default_warehouse_db.launch" if="$(arg db)">
<arg name="moveit_warehouse_database_path" value="$(arg db_path)"/>
</include>
</launch>


Hi @regoGr, I added you points so you can load your pictures.
Thank you @osilva!
Are you asking how to convert between radians and degrees?
@fvd, no. I have a program on Python and I want to send this values like input values to that program.