
Send automatically nav goal based on the map
Hello there,
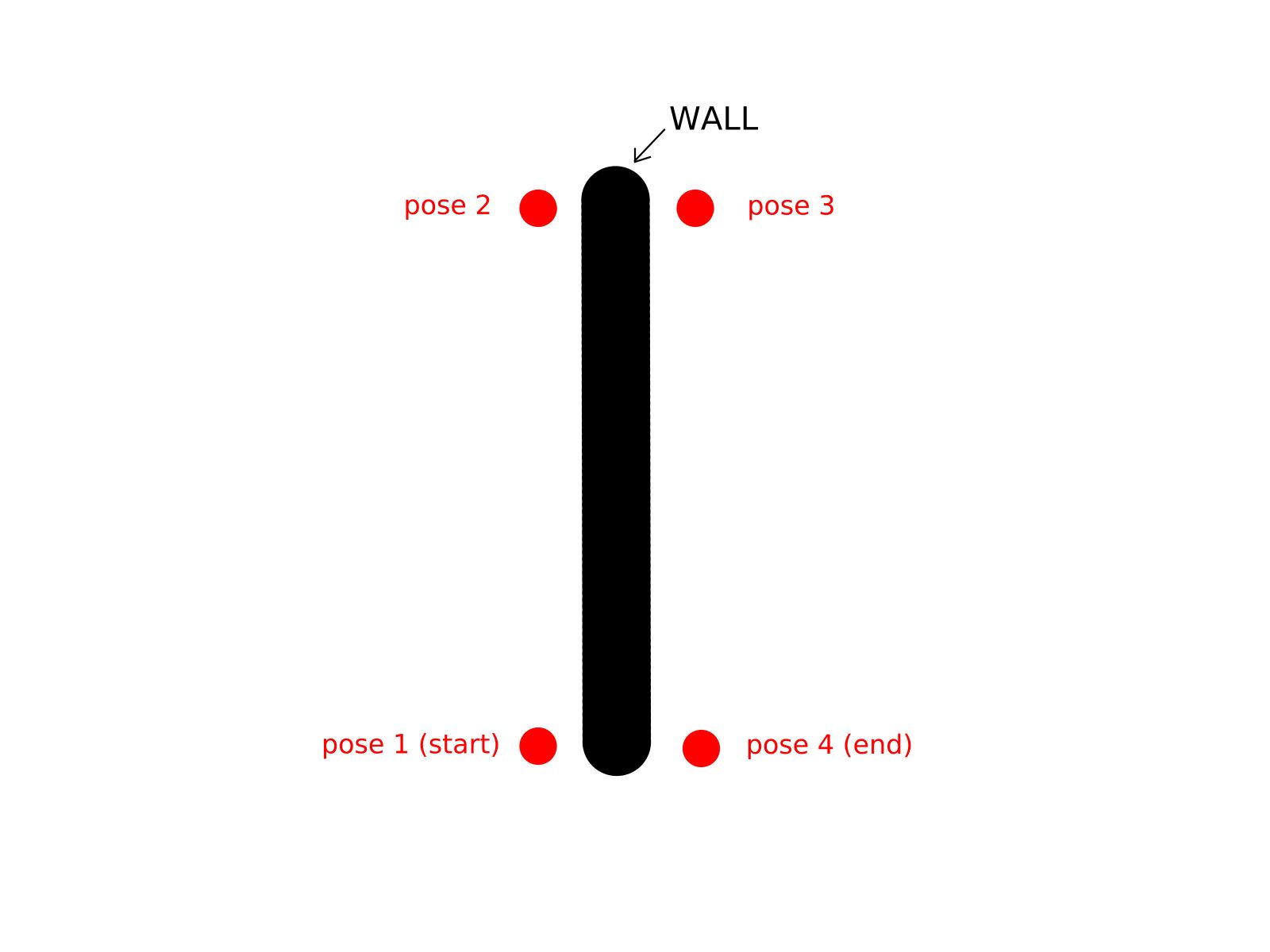
I am trying to create a script that sends automatically nav goals around a wall (so 4 poses) and then go to the next one and so on until the are no more walls left (see the photo below). I am thinking of sub into the map topic and take the edges of the wall and then convert them to poses after publishing them to move base, but I don't know how exactly to implement this... any ideas??
Thank you in advance!


I am a bit confused by your question. Are you trying to avoid the wall or just trying to send goals in a sequential manner? Also, what sensors are you working with?
the second one, the sensors I am using are lidar,imu and Odometry